Other SLAM Algorithms: CoreSLAM, Part 3
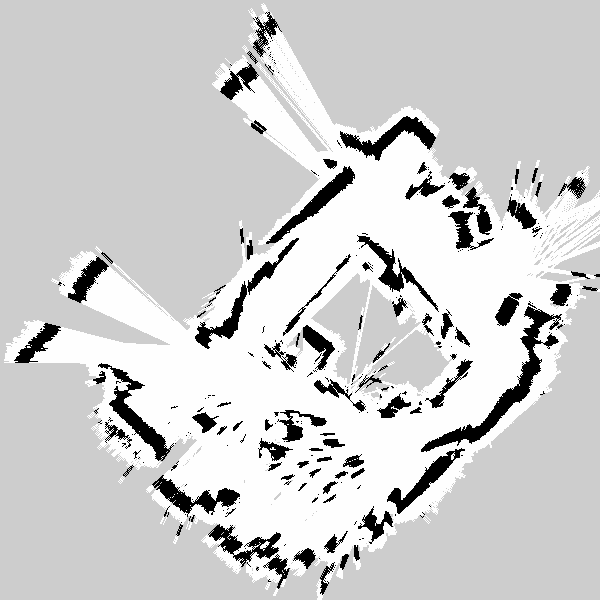
31 Dec 2010robots ros slam Here's another example map created (of the first floor of a home):
Next up on the docket of winter break projects: some updates to the ArbotiX ROS package, and a number of people perception algorithms.