Sensors Hate Dark Surfaces
20 Mar 2011maxwell robots ros 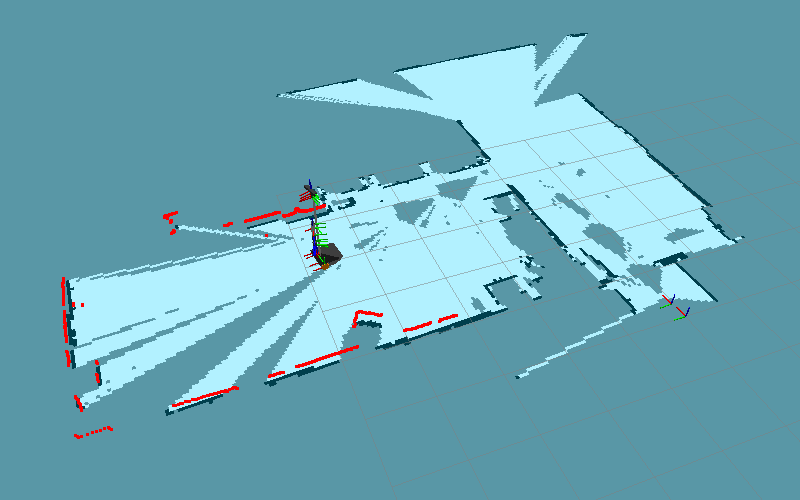
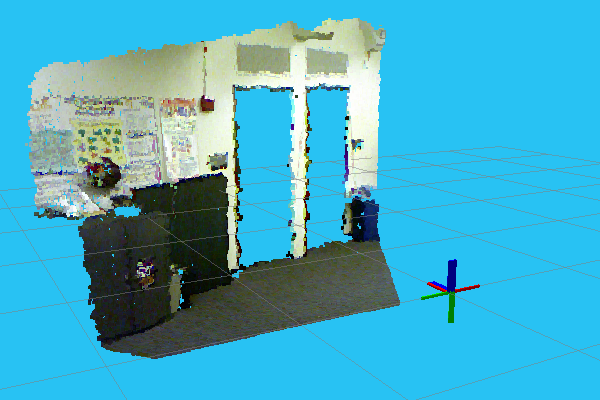
I've also found that the same black paint is on our doors, and wreaks havoc on the Kinect. The image below shows the RGB point cloud -- this is a Sunday, both doors are shut, yet invisible:
Luckily, it looks like the laser picks up the doors when close, so I won't have to worry about Maxwell driving through an invisible doorway.