Reviving Maxwell (and this blog)
01 Apr 2020maxwell robots ros We will start with an update on Maxwell, my longest running robot, which originally started as my Masters project at SUNY Albany. He's 9 years old now, although the only original parts are the laser cut base, the drive motors, drive wheels, and the the neck:

- January 2011 - Maxwell is created with an Arbotix, a series of EX-106 and RX-64 servos, Hokuyo URG-04LX-UG01 laser, a Kinect, and a massive Dell laptop.
- March 2011 - Maxwell gets an Emergency Stop.
- August 2011 - Maxwell wins the AAAI Small Scale Manipulation Challenge.
- December 2011 - Maxwell gets a vertical lift so he can reach the ground and the table. Around the same time, the camera got upgraded to an Asus Xtion.
- Summer 2012 - Maxwell gets upgraded to a MX series servos. I also wrote a three part article about this in SERVO magazine.
- Summer 2013 - Maxwell gets upgraded to use MoveIt.
- Fall 2014 - Maxwell gets upgraded to and Intel NUC and the Etherbotix controller, an ARM-based, Ethernet-connected replacement for the ArbotiX I was originally using. I also created lots of documentation so that Alan Downing from HBRC could build a Maxwell clone (ROSwell)
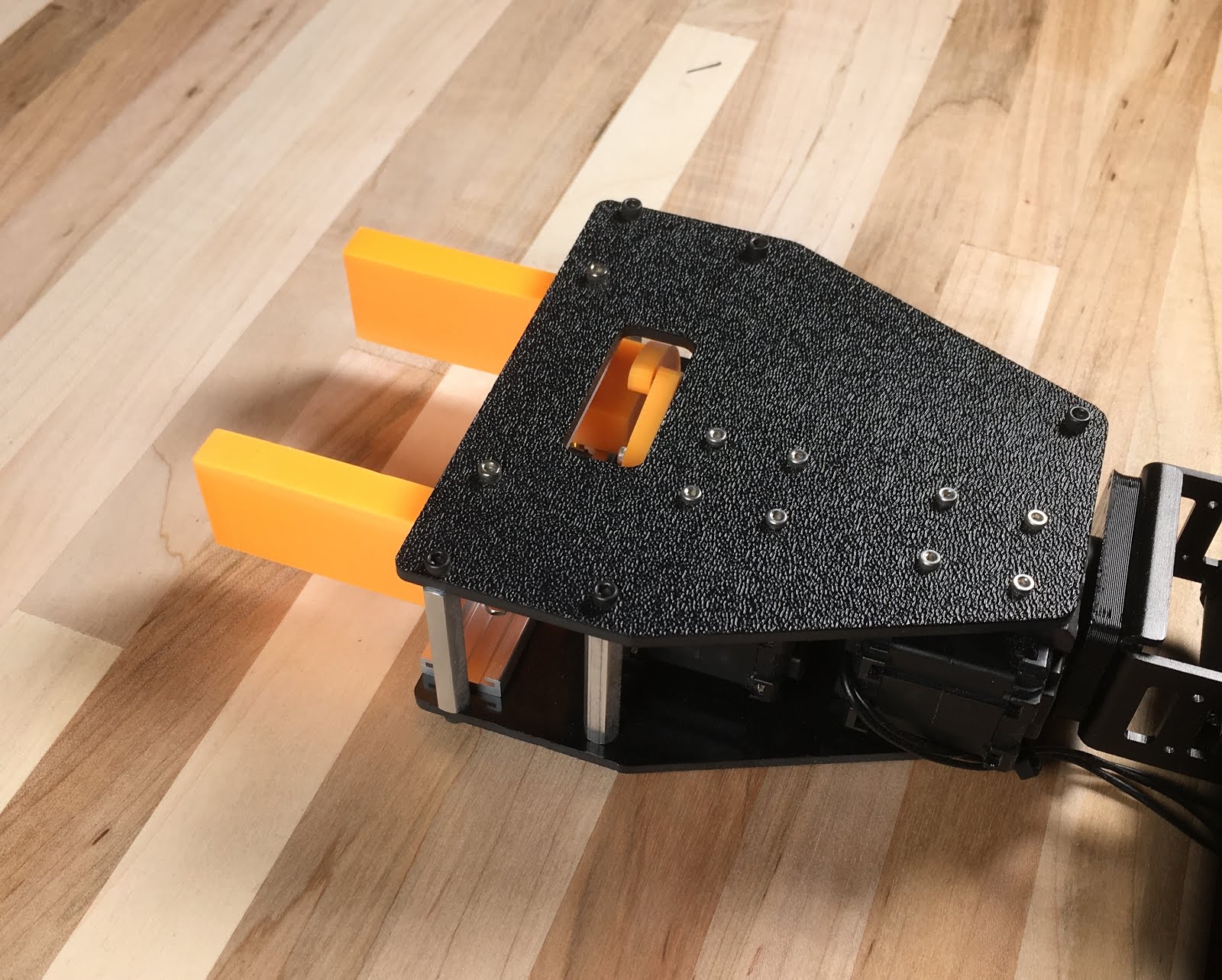
- Spring 2018 - Maxwell gets a parallel-jaw gripper (more on this below).
- Spring 2020 - lots of updates.
While the parallel-jaw gripper was physically installed on Maxwell some time ago, and the URDF had been updated, I never actually finished the software to control the gripper -- that's the project for later this week. In the meantime, here are some close up shots of the gripper: