UBR-1 on ROS2
08 Jun 2020ubr1 robots ros2 The latest ROS2 release, Foxy Fitzroy, was released last Friday. In addition to targeting an Ubuntu LTS (20.04), this release will get 3 years of support (more than the previous 2 years, but still quite a bit less than a ROS1 LTS release which get 5).
Since I already have the UBR-1 running 20.04, I decided to try getting it running on ROS2. I’ve made a decent amount of progress, but there is still a long ways to go, so this is the first of what will probably be several blog posts on porting the UBR-1 to ROS2.
I’ve had several false starts at switching over to ROS2 over the past few years. Each time I would start going through some tutorials, hit something that wasn’t documented or wasn’t working and just go back to using ROS1. I’d love to say the documentation is way better now, but…
Starting with the Messages
The challenge with such a big port is trying to just get started on the mountain of code in front of you. Logically, you need to start on the lowest level dependencies first. For this project, it was a series of message packages that had to be ported.
The robot_calibration package includes an action definition that I use for the gripper on the UBR-1, so the drivers depend on it. ROS2 message packages are pretty straight forward to port from ROS1, although there are a few caveats to be aware of. I didn’t have to change any of my actual message definitions, so the entire change consisted of package.xml and CMakeLists.txt changes. You can find the commit here. A similar commit exists for porting the robot_controllers_msgs package.
So, what are some of those caveats to be aware of?
The first one relates to terrible error messages. I was originally missing this from the package.xml:
<export>
<build_type>ament_cmake</build_type>
</export>
Which causes this build error:
CMake Error at /usr/share/cmake-3.16/Modules/FindPackageHandleStandardArgs.cmake:146 (message):
Could NOT find FastRTPS (missing: FastRTPS_INCLUDE_DIR FastRTPS_LIBRARIES)
What??? It took a while to figure that one - especially since my debugging went like this:
- Unable to find solution, manually specified CMAKE_PREFIX_PATH to /opt/ros/foxy.
- Probably added the ament_cmake while continuing to develop during the day.
- Next day, build errors are gone even before I set the CMAKE_PREFIX_PATH - yay!
- Same error returns when I start working on porting another package - boo!
- Finally realize that the export ament_cmake in package.xml is the important part (the CMake itself was all OK, it took a closer reading of this answers.ros.org post) - yay!
The second caveat to watch out for: make sure ALL your dependencies are specified for messages. I finished porting all of these message packages and then ran into issues when I finally got to my first node using them. The nodes exited immediately due to missing symbols. The initial port of ubr_msgs compiled just fine. The node depending on it also compiled just fine, but would not run.
The fix was simply to add a std_msgs dependency. A few packages you probably should depend on:
- action_msgs - if you have any actions defined at all.
- builtin_interfaces - if you use time or duration (or std_msgs/header, which has time in it).
- std_msgs - if you use std_msgs/Header.
Porting robot_controllers_interface
I had recently updated the UBR-1 to ROS Noetic and to use the robot_controllers package that I wrote at Fetch Robotics. So my next step was to port the robot_controllers_interface to ROS2. For those following along, here’s a few commits:
- first pass - mainly cmake/package.xml changes, replacing ros::Time with rclpp::Time and porting to rclcpp::Node instances. The biggest chuck of code is porting an action server, but it is a super simple one (that honestly could be a service). I also took a moment to change all the boost::shared_ptr to std::shared_ptr.
- a bunch of fixes - I made the library SHARED (which used to be default in ROS and is very much needed if you plan to load this code as a plugin! This also moves the Controller and ControllerManager class into the robot_controllers_interface namespace, passes the ControllerManager by std::shared_ptr, and declares all parameters so they actually work.
The package.xml and CMakeLists.txt are largely uneventful:
- replace catkin with ament_cmake.
- replace roscpp with rclcpp.
- depend on rclcpp_action since we have an action interface to start, stop and load controllers.
- remove Boost, since we can use std::shared_ptr.
The actual API changes for were a bit more involved. Many things now require access to the rclcpp::Node (which is similar, but not exactly like the ros::NodeHandle). Most examples simply show developing a ROS2 component that derives from rclcpp::Node. Which is nice for simple demos, but in a larger system with multiple controllers, leads to a lot of overhead (each node has a bunch of services for parameters, etc).
I initially started passing lots of extra strings around until I found this undocumented feature: sub_namespaces - which gives you functionality similar to NodeHandles. This seemed like a great way to get rid of the string name I was passing around. Unfortunately, it’s not only undocumented, it’s mostly broken for parameters. So I went back to passing names manually and concatenating them in the code.
This also leads to some interesting issues that didn’t exist in ROS1: nested parameter
names use a . for a separator, while topic names still use a /.
As I started to move into porting actual controllers, which are loaded as plugins, it became apparent there isn’t much (any?) docs on using pluginlib in ROS2. I did find an issue that suggested looking at the RVIZ plugins, which at least pointed out that the declaration of a plugin library has moved from the exports in the package.xml to a CMake directive. I’ll dig into that more in the next post when I talk about porting robot_controllers in detail.
One part of this port really stood out to me for how clean it made the code. While there are some
quirky aspects to parameters (why a .?), parsing large blocks of parameters in ROS always got
messy, consider this piece of code:
// Find and load default controllers
XmlRpc::XmlRpcValue controller_params;
if (nh.getParam("default_controllers", controller_params))
{
if (controller_params.getType() != XmlRpc::XmlRpcValue::TypeArray)
{
ROS_ERROR_NAMED("ControllerManager", "Parameter 'default_controllers' should be a list.");
return -1;
}
else
{
// Load each controller
for (int c = 0; c < controller_params.size(); c++)
{
// Make sure name is valid
XmlRpc::XmlRpcValue &controller_name = controller_params[c];
if (controller_name.getType() != XmlRpc::XmlRpcValue::TypeString)
{
ROS_WARN_NAMED("ControllerManager", "Controller name is not a string?");
continue;
}
// Create controller (in a loader)
load(static_cast<std::string>(controller_name));
}
}
With the new ROS2 API, it becomes this:
// Find default controllers
std::vector<std::string> controller_names =
node_->declare_parameter<std::vector<std::string>>("default_controllers", std::vector<std::string>());
if (controller_names.empty())
{
RCLCPP_WARN(node_->get_logger(), "No controllers loaded.");
return -1;
}
// Load each controller
for (auto controller_name : controller_names)
{
RCLCPP_INFO(node->get_logger(), "Loading %s", controller_name.c_str());
load(controller_name);
}
Launch Files
This was perhaps the most frustrating part of this exercise thus far. Documentation is lacking, and examples vary so widely it is like the Wild West out there. There just aren’t many real robots running ROS2 yet.
I finally managed to hack together a launch file which starts:
- The driver node, and properly passed it the URDF as a (string) parameter.
- An instance of robot_state_publisher, and passed it the URDF as well. Note: robot_state_publisher also publishes the robot_description parameter it receives to a topic, which rviz2 can then use.
- An instance of urg_node_driver. (currently patched - see GitHub issue).
You can find the launch file on GitHub
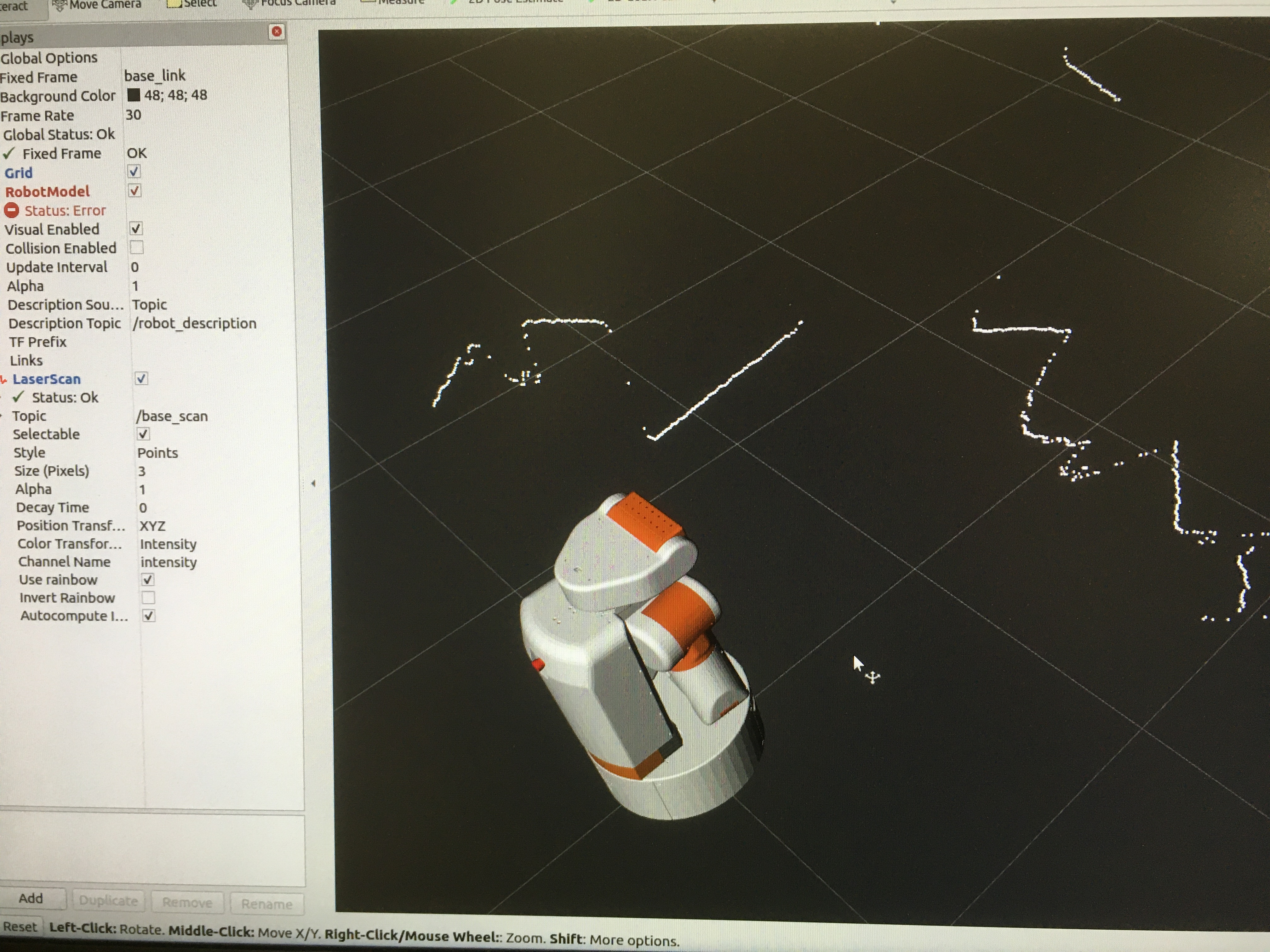
Progress in RVIZ
At this point I was publishing the joint positions, IMU, and laser data. It was time to fire up rviz2:
Next Steps
I’m continuing to port robot_controllers - I’m sure I’ll have more posts about that.