Other SLAM Algorithms: CoreSLAM, Part 2
25 Dec 2010robots ros slam Here's an updated map using the 12-12-neato-ils bag file:
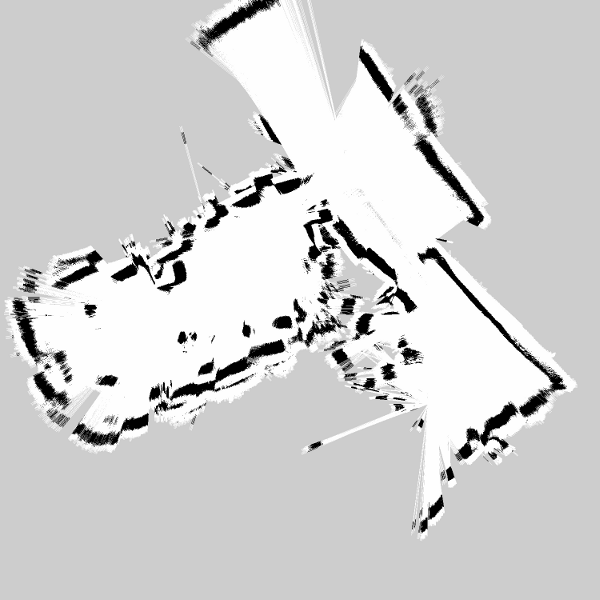
There's still some work to fix the way that the map->odom transform is handled, and allow a configurable map size and resolution (both of which will require reworking some more of the underlying library). I'm hoping to have the code released shortly.