Navigating Apartments with ROS
23 Dec 2011slam maxwell ros I've been trying for some time to use only the ASUS on the head, however, the thick carpeting and carpet/linoleum transitions really throw of my odometry at times. I finally dropped back and just used my low-cost Hokuyo. This evening I created a new map, without much effort at all, using gmapping and the Hokuyo:
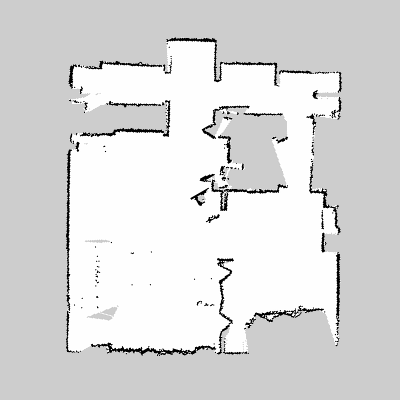 Some preliminary tests show that my planner parameters will probably work well, even in the
smaller environment (the map above is 10m x 10m). What is very apparent is that my laser
doesn't pick up much of my furniture -- the larger room is actually mostly full with tables at
various heights, which are only showing up as stray points to the laser. Adding the ASUS for
3D obstacle avoidance should help quite a bit.
Some preliminary tests show that my planner parameters will probably work well, even in the
smaller environment (the map above is 10m x 10m). What is very apparent is that my laser
doesn't pick up much of my furniture -- the larger room is actually mostly full with tables at
various heights, which are only showing up as stray points to the laser. Adding the ASUS for
3D obstacle avoidance should help quite a bit.