Move'n'It
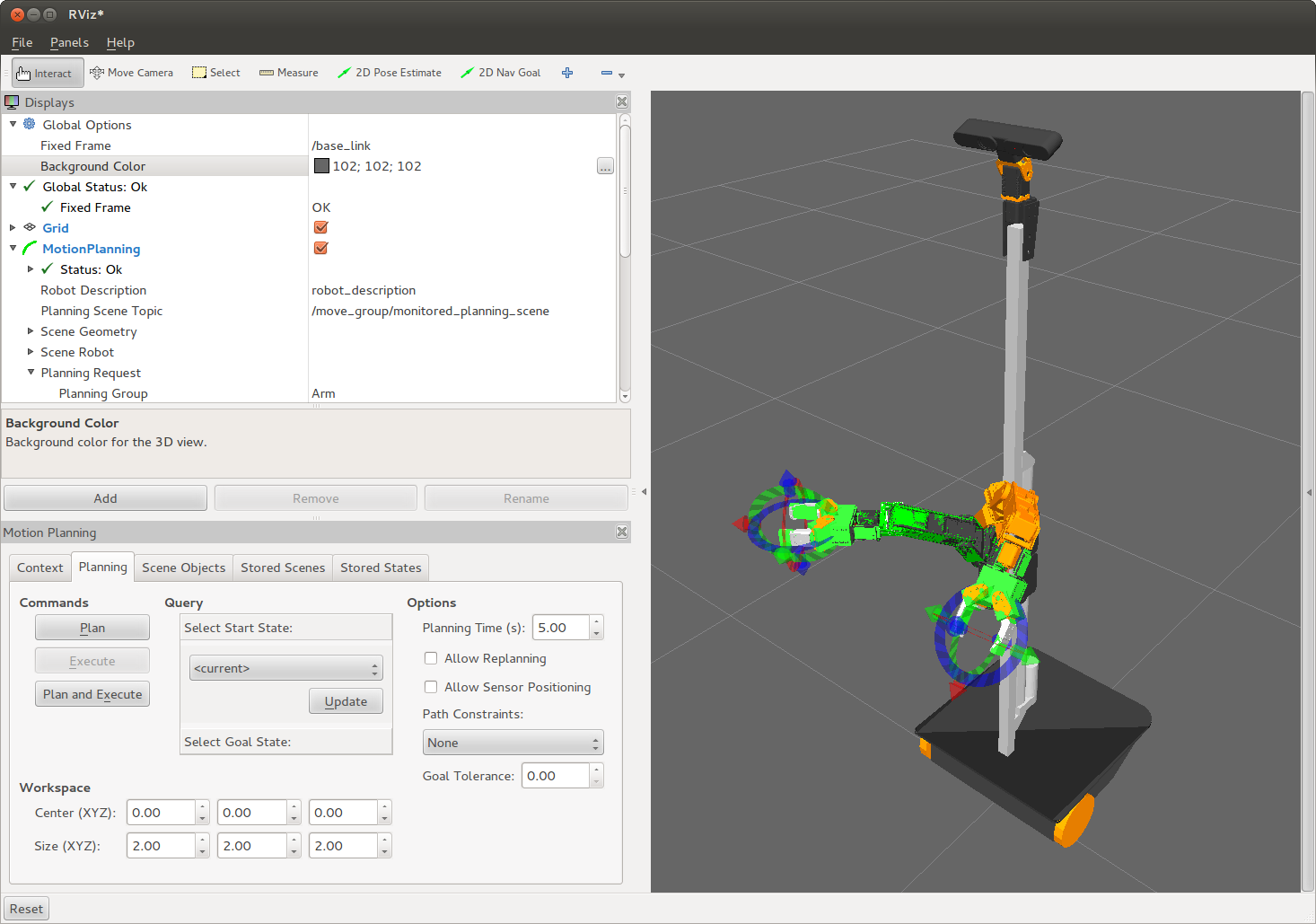
26 Feb 2013moveit maxwell ros In the past, I had wrapped arm_navigation's move_group with the simple_arm_server package, which allows 5-DOF arms, like Maxwell's to work with MoveIt. This time, I've taken the easy way out and just added a 6th degree of freedom, an upper arm roll:

I had one extra MX-64 around, and printed a couple of brackets on a MakerBot Replicator (files are posted on Thingiverse). With this extra servo, all of MoveIt pretty much works out of the box. Once I wanted to control the real robot, I ran into a bit of issue. While I've heard that you can use the PR2 controller manager plugin, I couldn't quite get the settings correct. I therefore created a simpler version, which you can find in
While MoveIt is still version 0.3.20 something, it's actually pretty awesome.