answers.ros.org: A Quick How-To
21 Sep 2014ros 1. Don't be afraid to ask a question
The name of the site may be "ROS Answers", but there is no point in having answers if there are not questions. Often I find that people comment on old questions, or post answers to old questions, hoping to get help for a possibly related problem. Your comments will probably be missed by anyone who did not previously participate in that question/answer thread, and posting an answer with a question is just bad etiquette. If you have a question, open a new question!2. But before you ask a question, check to see if someone has already asked and answered the exact same thing!
There are over3. If you ask a question -- try to make sure other people will be able to find it some day by adding appropriate tags.
That search thingy in #2 depends on questions being properly tagged. Adding a few (useful) tags will both help get you an answer faster, as well as making sure that the next person with the same question can find your question and the answer to it. "ros" is probably not a useful tag, the name of the package, node, or command in question would be good tags. Including tags for the specific hardware you might be using could also be useful (for instance "kinect" or "pr2")4. Close button is evil. Karma is good.
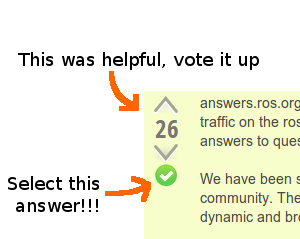 This is probably the most misunderstood aspect of ROS Answers. People frequently post a
comment saying "thanks, that works" and then click the "close" button on the question
instead of selecting an answer. Please don't do this! Instead, click the checkmark next
to the question to select the answer to your question. You can only select the answer on
questions that you asked, however, if you find an answer to someone else's question that
helps you, you can give a little Karma by clicking the "up arrow". The answer to the
right here has been upvoted 26 times -- it must be pretty good.
This is probably the most misunderstood aspect of ROS Answers. People frequently post a
comment saying "thanks, that works" and then click the "close" button on the question
instead of selecting an answer. Please don't do this! Instead, click the checkmark next
to the question to select the answer to your question. You can only select the answer on
questions that you asked, however, if you find an answer to someone else's question that
helps you, you can give a little Karma by clicking the "up arrow". The answer to the
right here has been upvoted 26 times -- it must be pretty good.The answers website really depends on Karma. New users have restrictions (unable to post links, images, etc). New users NEED Karma to become more effective users. Power users need Karma to be able to moderate the site, like retagging those questions where people didn't get the tags right.
5. Finally, make sure somebody can actually maybe answer your question.
Good answers require good questions. If you get an error in the console, certainly include that exact error into the question. A summary of the error, or "I got an error" are not substitutes for the actual error or traceback. Tells us exactly what commands you ran. Other things you probably want to include: what ROS version, operating system, and robot you are running -- and if you aren't running from up-to-date debs from the OSRF apt repo, you probably want to point out how you installed ROS.* I started writing this post a few days after the 15000th question was posted. I finished writing it 3000 questions later....