22 Oct 2024
ubr1
robots
ros2
Yet another post on ROS2 and the UBR-1. Here are quick links to the previous posts:
Installation
MoveIt2 is still evolving, and the Debian builds seem to be quite out of date most
of the time, so I would suggest doing a source install. I’ve had
good results lately with the main branch building on both Iron and Jazzy. In
addition to the moveit2 repository,
I’m also building the ros2 branch of
moveit_msgs and
moveit_task_constructor from source.
MoveIt2 Setup Assistant
Everything in MoveIt really starts with the MoveIt Setup Assistant (MSA). Unfortunately,
the MSA was one of the last components migrated to ROS 2 (at least partially because launch
files are massively different from ROS 1). While the MSA is still a bit brittle,
it is pretty well documented with a
tutorial
which I followed quite closely.
The MSA basically exports a new ROS 2 package, typically called [robot_name]_moveit.
You can find my ubr1_moveit export
here.
This package includes a custom set of configuration and launch files for the robot
to use MoveIt2. In comparison to the files generated in ROS 1, these end up being a bit
less easy to modify since most of the “launch” file is actually part of the
moveit_config_utils package.
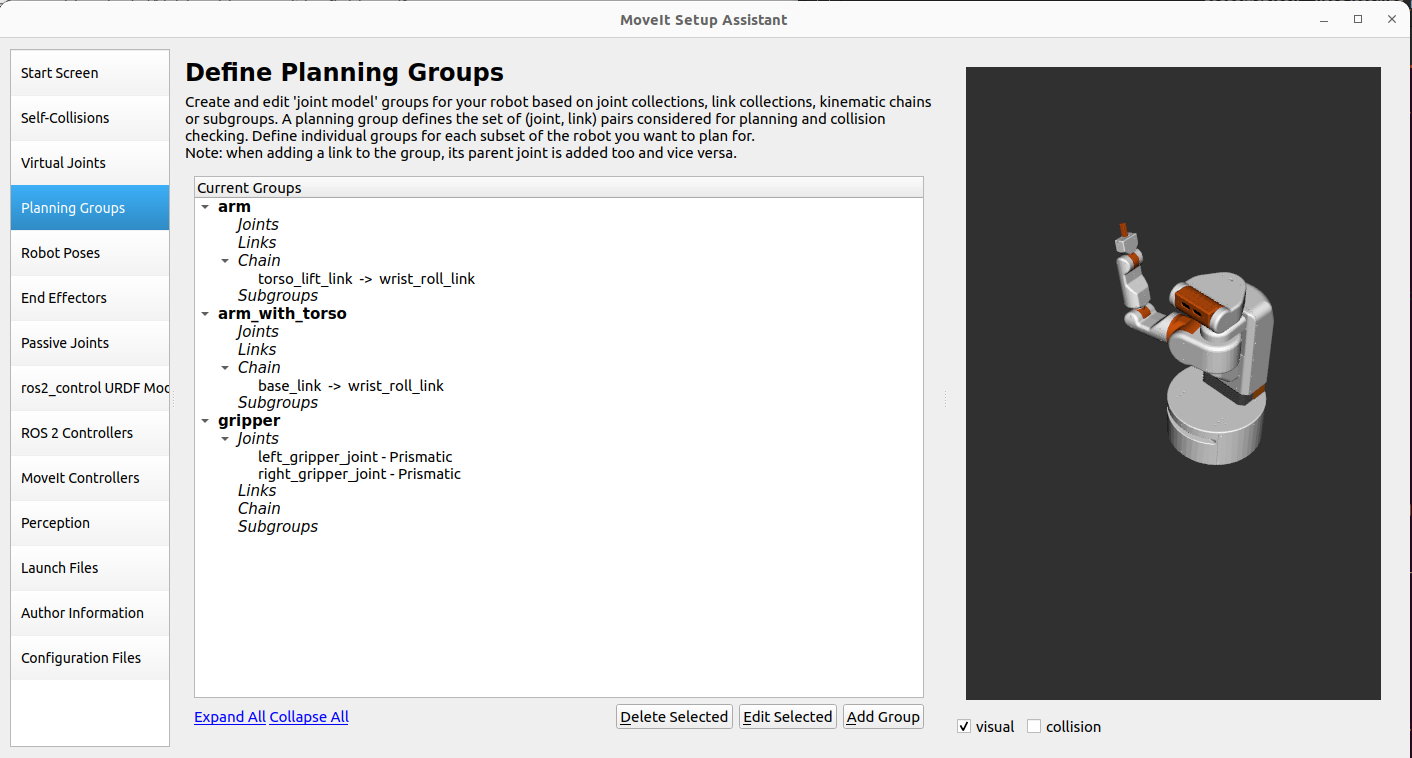
For the UBR-1, I defined three planning groups:
arm - This is defined as the seven joints of the arm and is the usual
planning group. I also defined a ‘ready’ pose that I use for getting the
arm out of the way of the camera.arm_with_torso - This is again defined as joints, but this time including
the torso lift joint. This planning group is occasionally useful if you need
a larger vertical range of motion.gripper - This is defined as the two gripper joints, and no IK solver
is configured for the group. Poses were defined for “open” and “close”.
After first exporting the MSA config, I had make a few minor tweaks. The most notable
is that I had to add acceleration limits to the joints as the Time Optimal Parameterization
now requires acceleration limits. These values were added to the config/joint_limits.yaml
file.
I also had to manually update the collision matrix in the SRDF file to allow collision
between the bellows and the torso/base. I’m not sure why the collision checker in the
MSA didn’t pick up that these are always in collision, but I couldn’t plan without these
collisions being allowed.
Definitely commit any changes to your configuration before re-exporting with the MSA because
it will override/lose some changes in many cases and git diff will help you track what
was lost.
Once we have an export, we can test things using the demo.launch:
ros2 launch ubr1_moveit move_group.launch
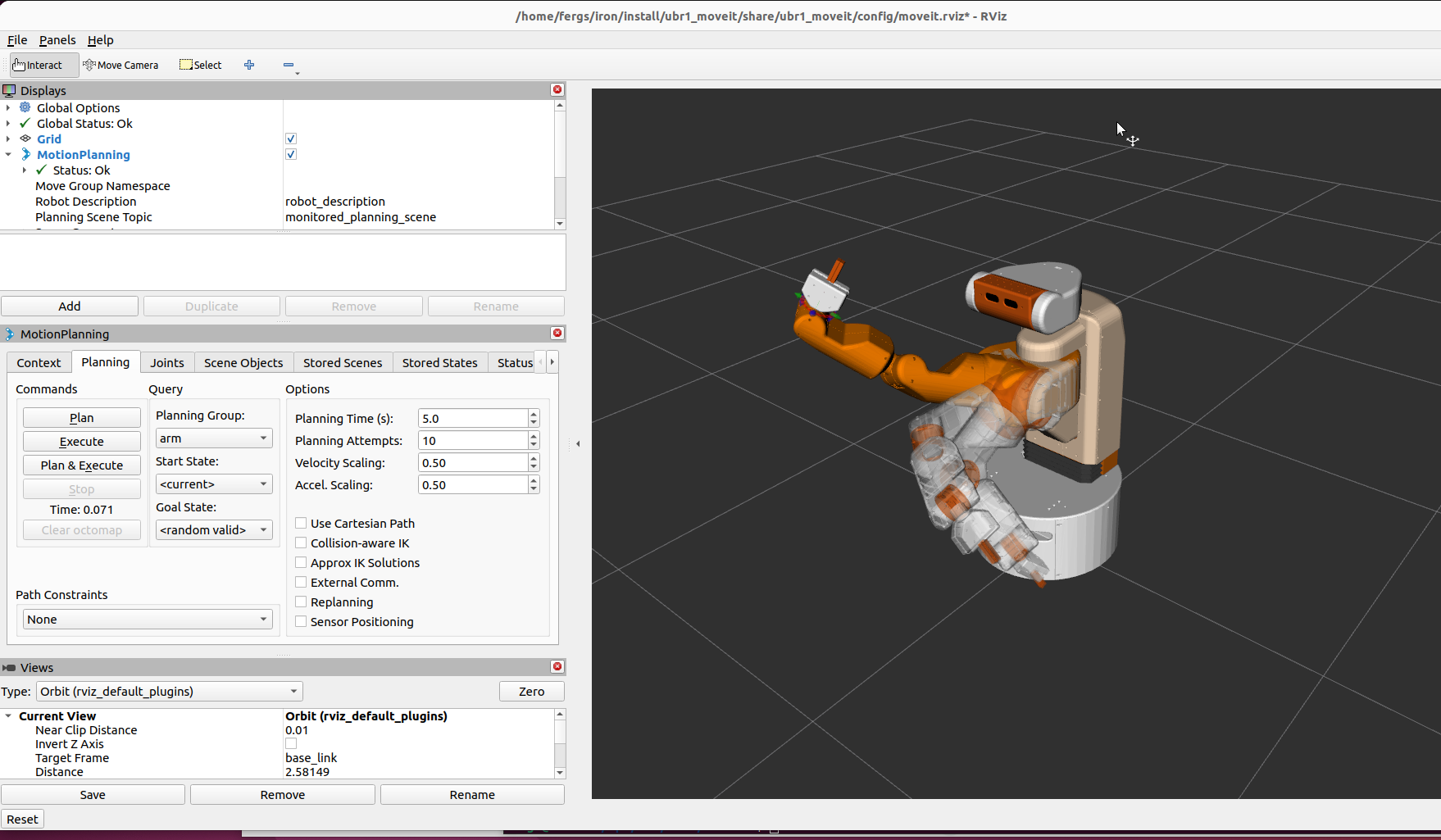
Planning worked well but I was unable to execute any motion plans in the demo environment.
I found that because I had two groups using the arm - I needed to switch controllers
using the rqt_controller_manager tool. This isn’t an issue on the real robot
where I use robot_controllers instead of ros2_control, which does automatic
switching of controllers when they receive an action goal.
One thing to keep in mind - when loading the rviz2 plugin for MoveIt2 - always use the
RVIZ2 launch file generated by the MSA. Since there is no shared parameter server,
this launch file will properly populate the kinematics parameters for rviz2. Without
those parameters, you’ll not be able to plan (and the interactive markers will be
missing).
Along the way, I had to fix a few bugs:
I found you might also have to set the DISPLAY variable in your environment if
running headless.
MoveIt2 Without ros2_control
Much of MoveIt2 assumes you are using ros2_control - but I’m not.
I continue to use my alternative framework
robot_controllers.
This is still supported in MoveIt using the simple controller manager
which does no controller switching, but interfaces with the standard
control_msgs actions expected for arms and gripper.
Some Interesting Debugging
Once I had MoveIt2 setup to interact with the robot, I could plan motions and move the arm
without issue, but I was unable to actually get MoveIt2 to control the gripper. It turned out
that the action server implementation in my gripper driver wasn’t entirely correct:
- The driver wasn’t storing the shared pointer to the active goal.
- This caused the goal to go out of scope and be destructed.
In theory this would be an easy issue to debug - but two things threw me off:
- I had been using my teleop node to open and close the gripper without issue - but at
no point was I actually looking at the responses from the action server, it was just
letting things run open loop.
- MoveIt2 reported that the action failed due to “preempted”. This didn’t make much
sense since none of the “preemption” logic in my action server was triggering any
of the logging messages.
I ported this driver to ROS 2 quite some time ago, but now the easy approach if you only
need one action goal active at a time would be to use the simple_actions package. I
did just that later on when calling my grasping perception for the pick and place demo.
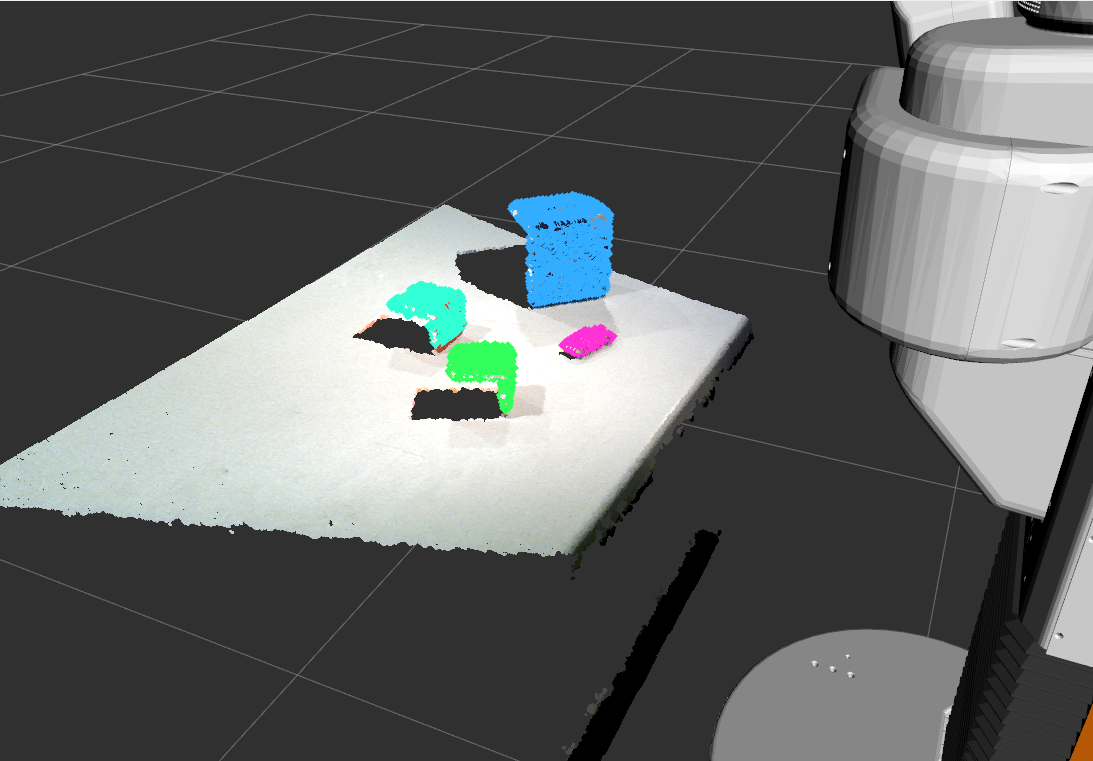
Simple Grasping
Perception is really the weak part of the ROS ecosystem. There are numerous packages
available for controls and planning, but not much for perception. Years ago I created
a package simple_grasping which segments a point cloud into objects and support
surfaces which can then be used for pick and place. Actually porting the code to
ROS 2 was fairly straight forward.
One of the issues I’m seeing in Jazzy that I have not yet resolved is that for large messages
(such as images or point clouds), a reliable publisher connecting to a best effort
subscriber seems not to work - there isn’t any issue with QoS mismatch, but no images get
through. My workaround has been to add QoS overrides to a number of nodes. For instance,
in simple_grasping, I have the following code:
// Would prefer to subscribe to head camera cloud as best effort
rclcpp::QoS points_qos(10);
points_qos.best_effort();
// But due to issues in Jazzy, allow overriding QoS at runtime
rclcpp::SubscriptionOptions sub_opts;
sub_opts.qos_overriding_options = rclcpp::QosOverridingOptions::with_default_policies();
cloud_sub_ = this->create_subscription<sensor_msgs::msg::PointCloud2>(
"/head_camera/depth_registered/points",
points_qos,
std::bind(&BasicGraspingPerception::cloud_callback, this, _1));
std::bind(&BasicGraspingPerception::cloud_callback, this, _1),
sub_opts);
(You can see the full set of changes here)
And then in my launch file, I can override the
Node(
name='basic_grasping_perception_node',
package='simple_grasping',
executable='basic_grasping_perception_node',
parameters=[{
'qos_overrides': {
'/head_camera/depth_registered/points': {
'subscription': {
'reliability': 'reliable',
}
}
},
}],
)
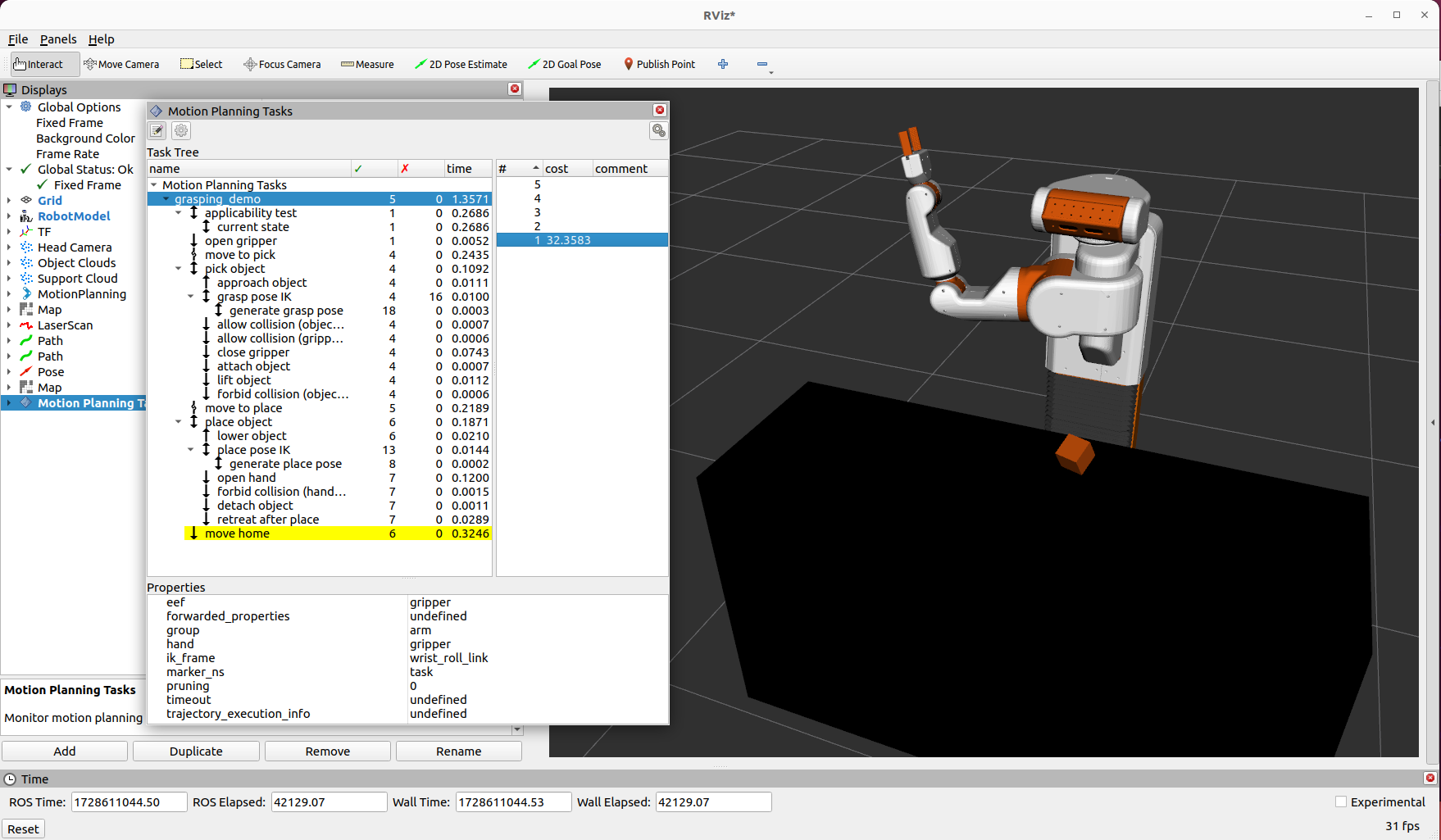
Pick and Place Demo
Not every feature from MoveIt in ROS 1 made it into MoveIt2. One of the big features that
was dropped was the pick and place part of move_group. Users are instructed
to use the MoveIt Task Constructor (MTC).
It seems to be a common theme in ROS 2 that things are designed to be much more capable,
but then are much harder to use and also poorly documented. This theme holds up for pick
and place. I ended up spending more time setting up an MTC pick and place node than
all of the other steps above combined.
There is a single tutorial
that shows how to do pick and place with a Franka arm. The tutorial uses
several simple components inside MTC to do the grasp generation and place
generation.
My implementation in the ubr1_demo
package is based off the tutorial. The files can be roughly described as:
pick_place_task.cpp - Used to create an MTC task for pick and place. It largely follows the
tutorial, with a few minor tweaks:
- Moved the
allowCollision modifications of the planning scene a bit earlier in the pick pipeline
as I was having issues with plans falling due to perception being imperfect and the object to
be grasped being in contact with the table top.
- Switched to using a custom
GenerateGraspsFromMsg grasp generator.
pick_and_place.cpp - Actual node that calls find_objects action from the simple_grasping
server, creates a pick and place MTC task, and then executes the task. This node uses David Lu’s
simple_actions package to call the find_objects action server.generate_grasps_from_msg.cpp - A custom pose generator that uses the grasps created by the
simple_grasping package rather than a hard coded list of rotations.launch/pick_place.launch.py - In order to load configurations (such as kinematics), the launch
file uses MoveItConfigsBuilder to add proper parameters to the node.
MTC has a nice visualization interface in rviz2 where you can inspect each step in the task. One note
that caused me some difficulty: you need to keep the MTC task in scope or you lose the visualization
in rviz2.
To actually execute the MTC plans, you need to also be running move_group with a modified launch file:
from moveit_configs_utils import MoveItConfigsBuilder
from moveit_configs_utils.launches import generate_move_group_launch
def generate_launch_description():
moveit_config = MoveItConfigsBuilder("ubr1", package_name="ubr1_moveit"). to_moveit_configs()
# Add the following line to load the MTC capability
moveit_config.move_group_capabilities["capabilities"] = ["move_group/ExecuteTaskSolutionCapability"]
return generate_move_group_launch(moveit_config)
The only part of the MTC that I had some issues with was the Connect stage between the ready pose and
the pre-grasp pose. There was some minor noise in the gripper position, which was causing issues. I found
a closed issue where the following was recommended to be added to the .rosconsole/config file:
log4j.logger.ros.moveit_task_constructor.core.Connect=DEBUG
log4j.logger.ros.moveit_task_constructor.core.Connecting=DEBUG
Next Steps
Now that I have all the building blocks working for the UBR-1 on ROS 2, I want to create a more compelling demo.
Stay tuned.
14 Oct 2024
robots
ros
ros2
This is another blog post that has sat in draft for 2+ years. I’m pushing it out ahead
of ROSCon this year where I’ll be talking about migrating the UBR-1 mobile manipulator
to ROS2.
For a long time I’ve wanted a better open-sourced local controller for ROS navigation.
It’s finally implemented, and has been running on the robot fleet at Cobalt Robotics
for about two years now. The full code of the graceful_controller is available on
GitHub.
Motivation
There are a number of local controllers in the ROS1 and ROS2 navigation stacks, but most
of them are based on either the
Dynamic Window Approach,
Trajectory Rollout, or
optimization approaches such as
Time Elastic Bands.
Both DWA and Trajectory Rollout suffer from a series of challenges:
- All of these controllers have many parameters, but the ones for DWA are especially
difficult to tune because they are highly interrelated (for instance the goal, path,
and obstacle biases). This is marginally improved by the DWB controller.
- The
sim_time parameter is especially difficult to tune for all operating
environments. Too long of a simulation time will make it difficult to enter tight
spaces (except at extremely slow speeds), while too low of a value will cause
instability
- DWA requires that users either have very good odometry response, or falsify their
acceleration limits to actually get robots moving. This is a reason so many robots
with low acceleration limits still use the older Trajectory Rollout controller.
- Even if these acceleration limits are defined properly, the way the forward simulations
work are pretty crufty.
For this reason, many people replace the default controllers - especially corporate
users of ROS. Sadly most of these improved controllers
don’t get released into the open source.
Goals
The goals for the new controller were quite simple:
- Accurately model the robot limitations (acceleration, deceleration, etc).
- Accurately forward simulate where the robot will end up.
- Produce repeatable results that look smooth and intelligent.
Underlying Algorithms
A number of years ago at Fetch Robotics, I wrote a package for our robots to autonomously
connect to their charge dock. Sometime later, Fetch open sourced the package under an LGPL
license. I used this same underlying control law for the first part of the new controller.
This underlying control law is based on a paper called A Smooth Control Law for Graceful Motion of Differential Wheeled Mobile Robots in 2D Environments by Park and Kuipers, which was presented at ICRA 2011.
This control law implements a closed-form solution to find a kinematically feasible linear
and angular velocity for a differential drive robot to approach a pose, based on just a few
parameters that are actually fairly robot-independent. The image below (from the original paper)
shows some example trajectories:
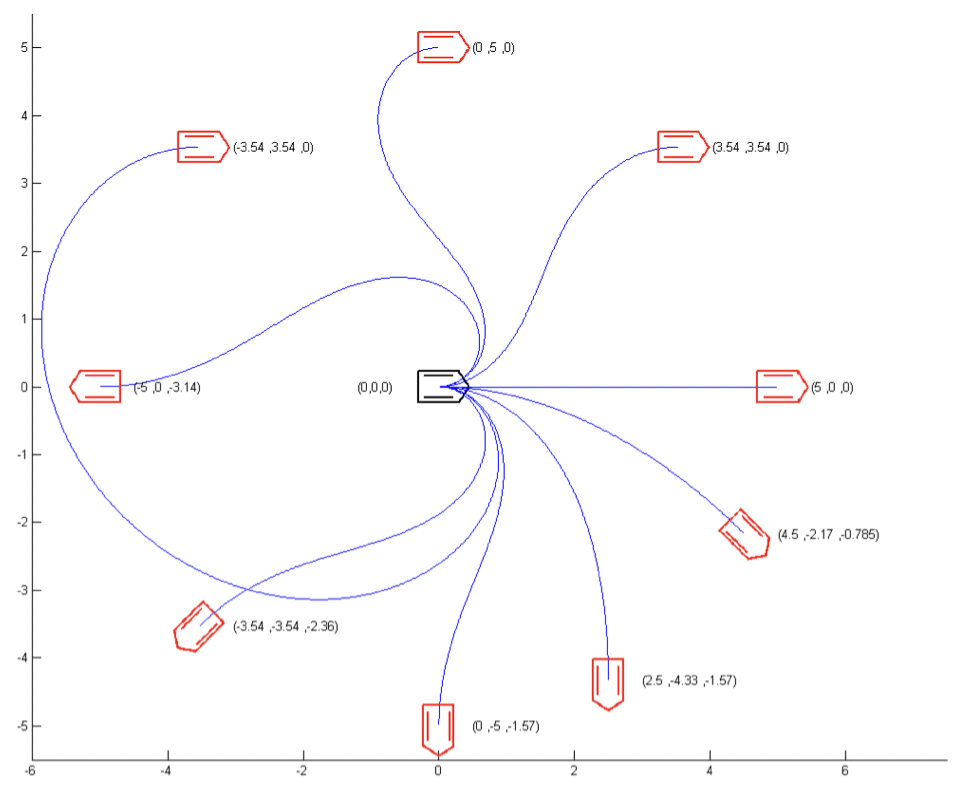
The underlying control law has a number of nice features:
- It automatically slows down for highly curved paths.
- It automatically slows to zero as the target pose is reached.
The underlying control law really only works for approaching a single pose - which we call
the target pose. This is exactly what docking with a charger entails. For
something like navigation, we typically need to approach a series of poses in succession
(since following the control law directly towards the final pose in the path is usually not
collision free). Section IV.B of the paper describes a fairly complex approach to do this,
however, our controller takes a simpler approach.
Our controller attempts to use as the target pose the farthest pose in the
path which is both A) less than some maximum lookahead distance away from
the robot, and B) reachable with our current control law parameters without collision.
The reachability portion is implemented through a forward simulation. Unlike DWA, the
forward simulation is not time-based, but rather terminates when we have reached the
target pose. Additionally, since the target pose is the farthest that we
have collision checked, we will actually forward simulate based on stopping at the target
pose.
The new controller is built out of two ROS packages. The first package includes the
underlying control law, which is licensed under the LGPL. The second package implements
a ROS1 or ROS2 plugin for navigation, and is licensed under BSD since it is loosely
based on the DWA codebase.
Additional Features
While the basic control law with target pose simulation works fairly well, there are
a number of additional improvements implemented:
- Optional initial rotation - since the control law can cause the robot to take
large sweeping arcs when the target pose is behind or to the side of the robot, we
implement an optional initial in-place rotation that points the robot towards the
target pose. If in-place rotation is not possible (due to collision), the regular
control law will be applied.
- Optional final rotation - similarly, for the final pose, it is possibly preferred
to approach the final pose without considering the heading of the pose. Once at the
final pose, the robot can rotate to the final goal orientation.
- Footprint Scaling at Speed - this feature inflates the robot footprint
at higher speeds. This allows the robot to move quickly in more open spaces but
naturally slow down when the environment gets tighter.
- Orientation filter - can be used to smooth out the orientations of the
poses in the global plan.
ROS2 Support
As it turns out, porting to ROS2 was fairly straight forward. Improvements to the controller
API in ROS2 mean that the following features are far easier to implement:
- The controller command velocity generation API natively passes the current robot speed,
which negates the need for additional boilerplate that existed in the ROS1 controller
to listen to the odometry feedback.
- The notion of variable speed limits is native to Navigation2, and the controller has
an API for it.
- The goal checking is split out to a different plugin.
Future Work
There have been quite a few developments since I first started working on this controller
in early 2021.
The Nav2 project added the MPPI controller, which addresses many of my concerns with
both DWA and Trajectory Rollout. My only issue with this controller is that it uses
special SSE/NEON instructions for parallelization, and so it doesn’t work on all CPUs
(in particular, I found it wouldn’t work on the very low end Celeron processor in
my FireBot).
An alternate implementation of the control law was also added to Nav2 as part of the
docking server project. It’s not quite ready to be a full controller yet, but at some
point I expect that version to supersede the ROS 2 implementation of my graceful controller
package.
Kudos
This work was supported in part by Cobalt Robotics.
01 Oct 2024
robots
This is not investment advice.
This probably shouldn’t be construed as advice of any kind.
Robotics Startups of the Past and Present
Over the past year or two, I’ve had a number of conversations that were basically
“why is it so much harder to get funding for robotics stuff these days?”.
While you could blame macroeconomics, lack of LP liquidity, and higher interest
rates, I think this actually largely comes down to the fact that there haven’t
been all that many really big exits in robotics. Robotics founders tend to be
very good at building cool tech solutions, but not so good at actually selling
and monetizing that technology.
When Kiva Systems sold to Amazon in 2012 for $775M, there weren’t all that many robotics
companies out there - so it looked like maybe this was a space that would generate
great returns. Now, a little over 10 years later, there have been a handful of exits
in the several-hundred-million-USD range (Universal Robots, 6Rivers, MIR, Fetch Robotics, Clearpath Robotics / Otto),
but most of those raised significantly more capital than Kiva Systems did and all of them
exited for a lower price than Kiva. None of them exited at the same kind of crazy
valuation that Google bought Nest for in 2014 ($3.2B - this was another “hardware”
exit that drove interest in robotics around that time).
Universal Robots and Mobile Industrial Robots (MIR) are setup more like traditional robot
manufacturers - they build robots, sell them at relatively low margins, and use an extensive
network of integrators who actually install and program the robots. Notably, both companies
come out of the EU - I feel that most US-based investors who do seed/A rounds would not
fund this sort of company today.
What those US-based investors do fund looks a bit different. These companies are largely
founded by robotics experts. They are vertically integrated, often manufacturing their own
robots in-house, building their own mapping, localization, navigation, and cloud-based
fleet management, and often setting up their own direct sales channels. Many of those
direct sales channels focus on “recurring revenue” by offering robots as a service.
There are numerous examples.
One outlier to this model though would be Locus Robotics. They weren’t founded by robotics
experts - they were founded by domain experts in third party logistics (3PL). These domain
experts were also a built-in customer - as an early customer of Kiva Systems, they had a
real need for a new robotics solution after the Kiva acquisition
And hey, guess what, Locus is doing pretty well.
Robotics is not SAAS
What surprises me is there are still investment firms trying this same playbook today.
They go out and fund a robotics company founded entirely by roboticsists (and for some
reason, many seem to think there are bonus points if every one of the founders is a
Robotics PhD and has never held a job outside of academia).
Some of these firms claim that RaaS is the new SaaS: spoiler alert - it’s probably not!
Robotics is capital intensive. Especially if you are buying all these robots, keeping them
on the books, and then renting them out with a 1-2 year payback window. Even worse:
robots age a lot worse than servers.
The really tricky thing about “robotics startups” is that the robot is JUST ONE PART
of the business / product.
It’s really just the starting point - and you will eventually end up expending
far more effort on the rest of the product: the software you need for deployment and
monitoring, the sales organization, the integration teams.
Finally, while many folks will tell you that “hardware is hard” - the bigger problem is that
hardware is SLOW. Supply chains have improved from the days of the pandemic, but
they are still slow, inefficient and generally a bit of a hot mess. So when you do suddenly
land all those orders - good luck getting the parts you need to actually fulfill the order
quickly.
/rant
Robotics Ecosystems
And now we get to something maybe actually useful to somebody. If our current generation of
robotic startups are fully vertically integrated and founded solely by robotics people,
what does the next generation look like?
Much of the really interesting stuff with computers and the internet started to happen when
people who weren’t just computer nerds were able to build companies in the space. I
think the same thing could happen for robotics.
These next generation robotics companies will have a founding team with domain experts
in whatever problem the robot is solving. These companies probably won’t even be called
robotics companies. They’ll be healthcare automation startups, or 3PL startups, etc.
They probably won’t be fully vertically integrated, instead choosing to use more off
the shelf hardware and software components.
We already see some of this happening today - in the early days of the RoboBusiness
conference, all sorts of “robot” companies exhibited - today, those robot companies
put much more emphasis in the tradeshows for their industry - show likes ProMat
or Modex for warehouse logistics
providers. The majority of exhibitors at robotics conferences are now selling
(largely hardware) components to robot companies.
With an ecosystem of more focused next-generation robotics companies, these startups
won’t have to build everything in-house. Companies like
InOrbit,
Formant and
Foxglove
exist today and offer a slice of tools needed to build a robotics solution. You can buy
robots from UR and MIR. The ROS 2 variant of navigation, Nav2, and arm planning (MoveIt2)
are already being used in
commercial products with far less customization than was needed in ROS 1 - and their
respective supporting companies (Open Navigation LLC and
PickNik) exist to help next-generation
robotics companies leverage these open source projects.
The Actionable Stuff
Numerous people have asked for startup advice over the years - I have often, wrongly,
focused on very narrow things (don’t go cheap on lawyers, etc).
I’m not sure I’ll ever do another robotics company, but here is what my dream
founder team would look like for a future robotics startup:
- CEO - A domain expert in whatever industry you are selling into. Significant
product experience. Should be able to sell - the CEO’s industry connections
will basically take the place of hiring a sales team initially.
- CTO - Robotics expert, with product experience. In order to properly lead
the (hopefully relatively small) engineering organization, and integration
of Off-The-Shelf (OTS) components and vendors, the CTO will need a solid grasp
of hardware, web/enterprise software, and any other product specific technologies.
Put that team together and then find a real product need - the simpler the better.
Robotics people love to over-complicate things. Do you really need a mobile base?
Do you really need an arm? Or is there some simpler automation solution that you
should be tackling?