08 Apr 2013
national-robotics-week
maxwell
ros
It's
National Robotics Week! And apparently, there is just
TOO MUCH ROBOTICS for just one standard week, because NRW spans 9 days, and the website lists events pretty much all month.
There are a number of events in the Bay Area. First up is the
Robot Block Party at Stanford from 1-6PM on Wednesday -- there are usually a ton of bots around in a somewhat impromptu show and tell. While I don't think I'll be pulling Maxwell out for this event, I'll probably be there for the later part of the event. Oh, and it's FREE.
Also this week is an interesting event by on Thursday at SRI, put on by Xconomy:
Robots Remake the Workplace. Including a keynotes speech from Rodney Brooks.
April 19-21, it's
RoboGames! Maxwell will be making an appearance there for sure, likely in the Silicon Valley HomeBrew Robotics Club booth.
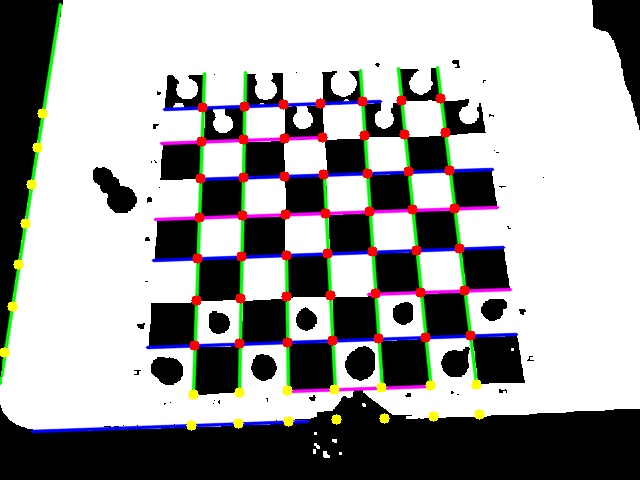
And finally, Maxwell will battle
PR-Lite at MakerFaire 2013. In chess, that is. That's right, I've dusted off the old AAAI Chess code and the PR-Lite guys have been working to adapt it to their robot. I actually ran into some major issues upgrading the chess code to Groovy as many of the PCL nodelets were not ported forward during the catkinization. So, I took this as an opportunity to rewrite the whole board/piece detection pipeline into a single node that is way faster than the old one, taking into account a number of better heuristics.
I'm still working to integrate MoveIt instead of arm_navigation, but the current code is
posted now on
github.
19 Mar 2013
ros
ROS has recently introduced a new buildsystem, called catkin, which is a replacement for rosbuild.
One of the greatest strengths of this new buildsystem is that it is pure CMake, which makes it
highly portable, standard, and awesome. However, one of the biggest weakenesses of this new
buildsystem is... well, it's entirely CMake, so it is a steep learning curve at times, and easily
riddled with bugs.
In typical ROS fashion, there are a number of tutorials on catkin
(
http://ros.org/wiki/catkin/Tutorials).
However, there really is a ton of info that is hard to compress into a small set of tutorials.
The rising tide
You'll often hear the term "wet" and "dry" for catkin versus rosbuild. The important take away here
is that it is indeed a
rising water level. In other words, "wet" (catkin) packages cannot
depend on "dry" stuff. This means you have to wait (or jump in and help) on any rosbuild package
that you depend on. The quickest way to see what is catkinized is to look at
http://ros.org/debbuild/groovy.html. If it says
wet, all good. If something is listed as dry there, it may still be catkinized in preparation for
hydro, but only the dry version went into groovy, so check the source repo for a hydro-devel
branch or similar.
How is the workflow different?
Catkin moves ROS towards a more standard Filesystem Hierarchy System (FHS) as detailed in
REP 122 as well as introducing out-of-source
builds and install targets. Understanding this FHS is key to proper catkin package design,
especially the install step.
How is a catkin package different from a rosmake one?
In rosmake, we had packages and stacks. In catkin, there are only packages. New catkin packages
have a package.xml instead of a manifest.xml and there are a number of changes to the set of
available tags. Especially different is that dependencies are all now of one time (no longer
are packages/stacks/rosdeps treated differently), but also you specify whether dependencies
are needed at build or run time. So what about stacks? Well, they were really nothing more
than a nice way to group a series of packages together. In catkin, this is handled by a
metapackage. A metapackage has only a package.xml, with
rundepends tags for each
package in the old stack. Details of catkin's pacakge.xml can be found on
http://ros.org/wiki/catkin/package.xml.
In addition to package.xml, CMakeLists.txt still exists, but is basically completely different
looking. If you are using Python for anything other than rosrunned-scripts, then you will almost
need to create a setup.py. There is a
migration guide available on the
wiki.
Long Live Roslib. Roslib is dead.
One of the major changes now is that with the new FHS, catkin-based Python scripts no longer need
to do a "import roslib; roslib.load_manifest()" as the Python path already includes all your
installed catkin-based packages. This also means it's easier to test stuff by starting a Python
shell and importing just about anything. Just be sure to include the appropriate setup.bash file
to get the paths right.
One potential pitfall of this is that if you used to just throw all your python source into
"package_name/src", you'll want to start doing "package_name/src/package_name" instead (and be
sure to have an __init__.py file in there). This makes the setup.py script dead simple, and also
ensures you get a real "python package" with the same name as your "catkin package".
Further Reading
As with any new system, there are a number of questions that arise which maybe the docs don't
fully cover. Here are a couple really good ones from ROS Answers over the last few days:
15 Mar 2013
arbotix
robots
ros
It's been about 18 months since ROSserial was first released. Since then, ROS has
undergone a number of changes, including a new build system, new message generators,
and more. Unfortunately, this massively broke ROSserial.
Over the past few weeks, I've spent a bit of time fixing up ROSserial to use the new
ROS build system, catkin. I've updated things so that message generation *mostly*
works. I'm sure there are still a number of bugs in there, but it's now mostly working
again and has just been released into Groovy as version 0.4.3 (currently on shadow-fixed,
should be in the public ROS debian repos in a few days).
Recently, ROSserial has been moved to github like so much of ROS. Across the board,
the move to github appears to have greatly increased community participation.
Speaking of the ROS community, there is another ROS on Arduino package recently
released:
ros_arduino_bridge.
Patrick Goebel of
PiRobot.org and the
Homebrew Robotics Club recently released this package which is primarily aimed
at controlling a differential drive base. I've frequently heard people ask about
running a diff-drive base using ROSserial, but the biggest problem is support for
the massive nav_msgs/odometry message. This new package doesn't have the
flexibility of rosserial, but definitely gets the job done for a mobile base.
Finally, ArbotiX drivers have had some minor updates and have been moved to catkin,
and are released. Version 0.8.1 should be in the next set of public ROS debians.