01 Sep 2012
3d-printing
robots
It has been a while since I've posted to this blog, I'll avoid making the typical
"that's about to change comment".
I do want to post links to a few relevant parts that I've uploaded to Thingiverse today.
These are kinda old, but never got shared, and since our MakerBot PC almost died this
week, I decided I had better get them out there before I lose them. Without further ado:
- The Asus Xtion "wide"-style Bioloid-frame mount
is now posted. This is the mount that I have been using on Maxwell for almost a year, and is much more
stable side-to-side than previous designs.
- An 8020 adapter for mounting tall masts on
TurtleBots.
- Finally, I've uploaded the style-ized version
of the TurtleBot gripper. These are tough to print, due to the overhang, but look pretty cool.
23 Dec 2011
slam
maxwell
ros
While Maxwell tends to reside at the office most days, I've recently brought him home a few times.
I'm now working towards some cool demos of mobile manipulation in a home environment, but the
first step is of course to navigate that environment.
I've been trying for some time to use only the ASUS on the head, however, the thick carpeting
and carpet/linoleum transitions really throw of my odometry at times. I finally dropped back and
just used my low-cost Hokuyo. This evening I created a new map, without much effort at all,
using
gmapping and the Hokuyo:
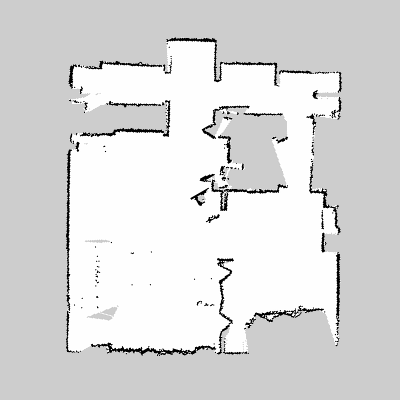
Some preliminary tests show that my planner parameters will probably work well, even in the
smaller environment (the map above is 10m x 10m). What is very apparent is that my laser
doesn't pick up much of my furniture -- the larger room is actually mostly full with tables at
various heights, which are only showing up as stray points to the laser. Adding the ASUS for
3D obstacle avoidance should help quite a bit.
21 Dec 2011
maxwell
robots
ros
I've been saying for quite some time that I wanted to add a vertical lift to Maxwell. Earlier this month,
he finally got that lift:

The linear actuator gives the arm 20" of additional vertical mobility, making it possible to grab objects
at floor or table height, or hit most light switches. The lift is currently integrated into ROS arm_navigation,
I'll have some awesome videos soon.
In addition to the arm upgrades, Maxwell recently got a new ASUS Xtion Pro Live to replace his Kinect.
The ASUS device requires only USB (no 12V power) and is significantly less heavy, reducing neck and back
stress (a common problem amongst aging robots). Speaking of aging robots, Maxwell turns one early next month.