22 Jul 2011
ros
My first project of the summer here at Willow is now in release: rosserial. (It was actually released
about 2 weeks ago).
This is a new library for connecting the Arduino platform to ROS, allowing an Arduino to directly
publish and subscribe to ROS messages. There are also demos ranging from controlling servos to using an
Arduino and rxplot as an oscilloscope to reading temperature sensors into ROS.
In addition to support integration with the Arduino platform, the rosserial library provides a general
point-to-point transport for ROS communication over serial, which is intended for hardware that cannot
support the full ROS TCP/IP network stack. This library can be used to easily integrate a wide-variety
of low-cost hardware into ROS.
Debian packages are now available for diamondback and unstable (shortly electric).
See more at:
http://www.ros.org/wiki/rosserial.
01 Jul 2011
3d-printing
robots
ros
I was never satisfied with the simple gripper we had put on the Mini Maxwell prototypes.
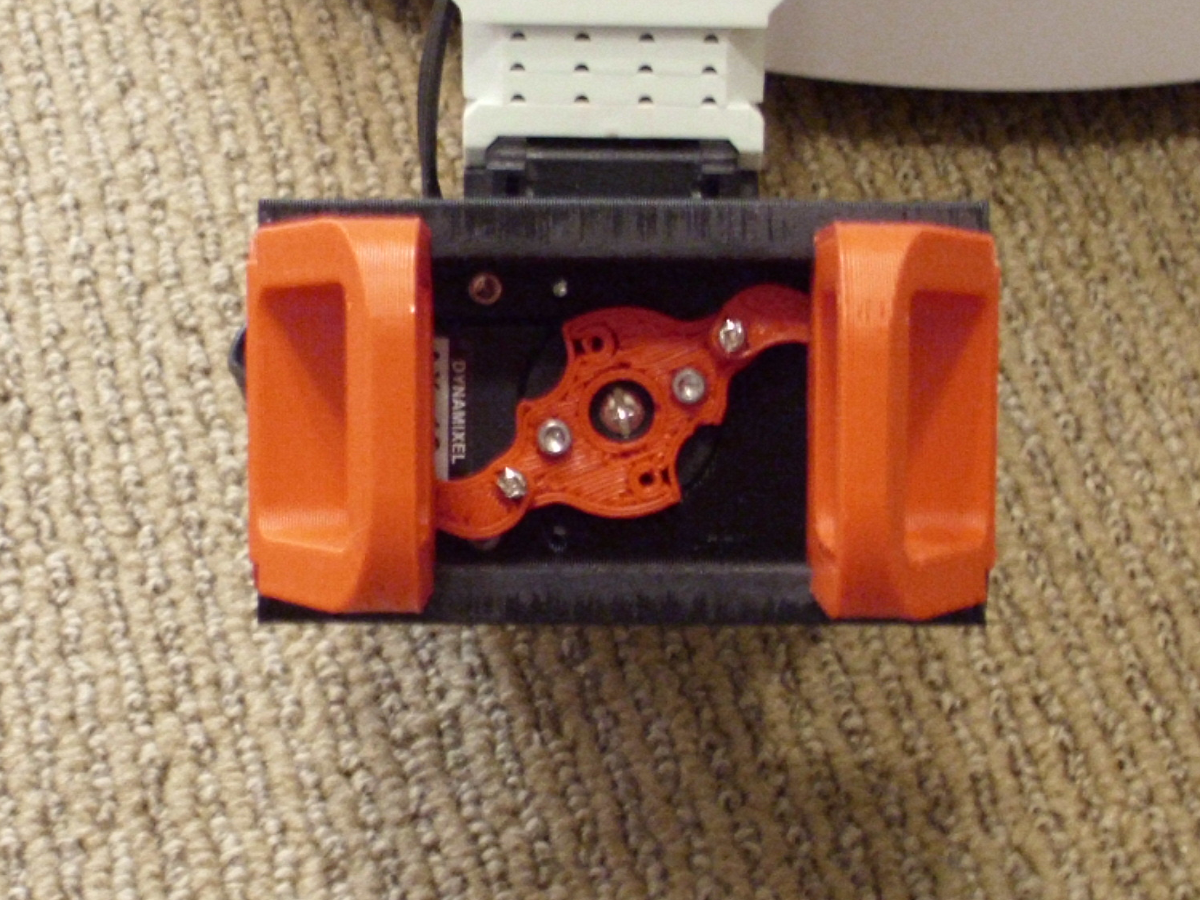
It took a bit of time to actually sit down and create the gripper I wanted, but I've now
printed up a couple prototypes:


The design was done in Autodesk Inventor:
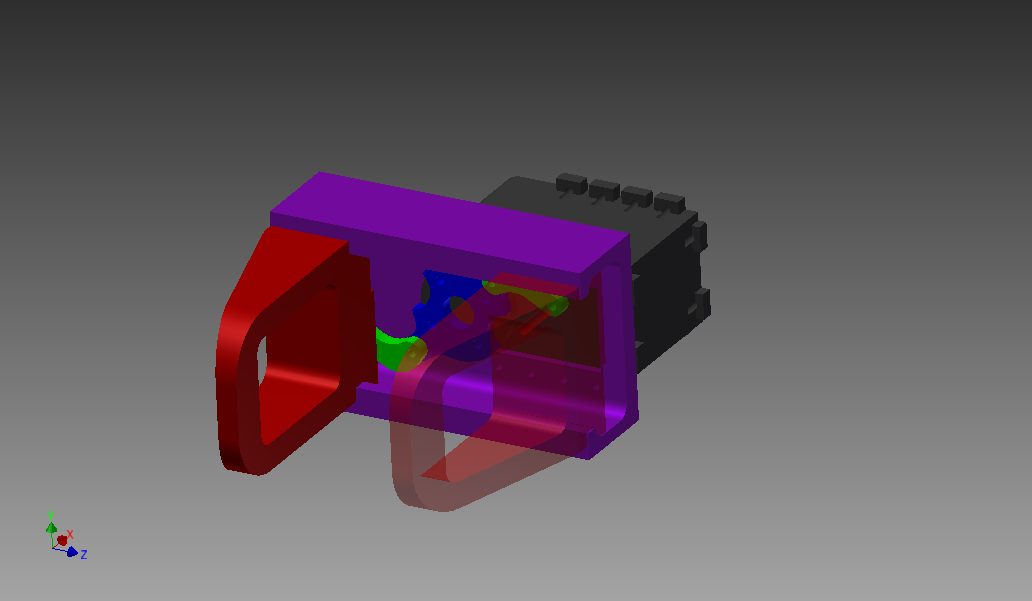
There is a simple mechanism for converting the motion of a single AX-12 to parallel motion for both jaws:
26 Jun 2011
maxwell
robots
ros
While I am a strong proponent of
low-cost, human-scale mobile
manipulators, I also realize it's impractical for everyone to be playing with such large robots.
Earlier this year I designed a small robot using an iRobot Create, some custom ABS, a Kinect, and an
AX-12 based arm and neck. This small mobile manipulation platform had no name for some time, but every
time I showed it to people they exclaimed "Oh! A mini version of Maxwell!". And so, this robot got the
name "Mini Maxwell".

There are now about half a dozen Mini Maxes running around across the United States. As our software
development is starting to calm down, I thought I would take a moment to showcase a few of the robot's
features.
As you probably have guessed, this robot runs ROS (on a netbook). We're using an ArbotiX to control
the arm and neck servos (7 AX-12s total), while the Create base connects directly to the netbook.
Two demo buttons are attached through the ArbotiX allowing users to quickly add user input to programs.

The arm has 4 degrees of freedom, losing the wrist roll found in Maxwell. A single servo gripper
is installed, although a more sophisticated one is in the works:

I demoed Mini Max earlier this week at the HBRC meeting, showing how we can easily move around toy blocks.
I've posted a number of tutorials and other documentation on the ROS wiki as well.