18 Feb 2009
gmr
trinity-fire-fighting
robots
I've nearly finished the mechanical & electrical assembly of GMR. I have to redo the
front plate of the head as the mounting holes aren't quite correct for the TPA-81. I also
have to rig up the UVTron in the back.
So far the navigation software is pretty solid, since its a small revision of the code that
won the CNRG in the fall. The room entry code needs some work, as well as the fire fighting
itself -- mainly to address the move from a pyroelectric to a TPA-81. I also plan to rework
the cornering code, so that the robot makes a smooth turn through the corners, rather than
stopping and turning 90 degrees. This was where LGM lost the most time, his run at CNRG would
have been good for about a 64 second final score at Trinity. That time would have beat the 2009
senior division winner, but would have been about 3x slower than the winner of the HS division.
I'm hoping that with these improvements I can cut the final score to about 20 seconds...
09 Jan 2009
gmr
trinity-fire-fighting
robots
I've made quite a bit of progress on GMR. The motor mount plate is finished, the head is shaping up,
the controller board is finished. I've written all of the drivers for the new I2C devices, and I am
working on building the head board. I've still got to mount the caster, make the upper deck out of
EPVC, and mount all the sensors in their final positions.
22 Dec 2008
gmr
trinity-fire-fighting
robots
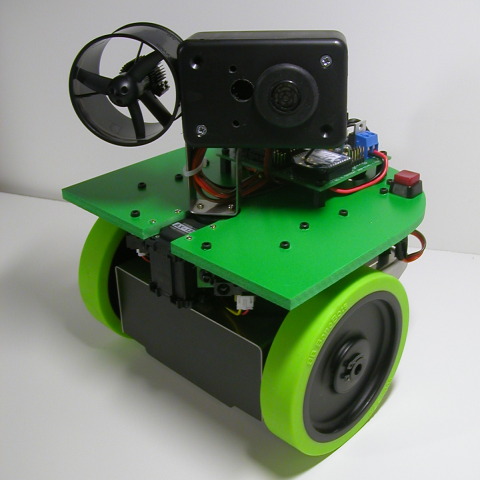
After the Little Green Machine won the Canadian National Robot Games last month, I have turned
my attention to the 2009 Trinity Fire Fighting Robot Contest. While LGM could probably just be
rolled back out and run, I'm instead rebuilding a new robot from the ground up - the Green
Machine Reloaded (GMR).
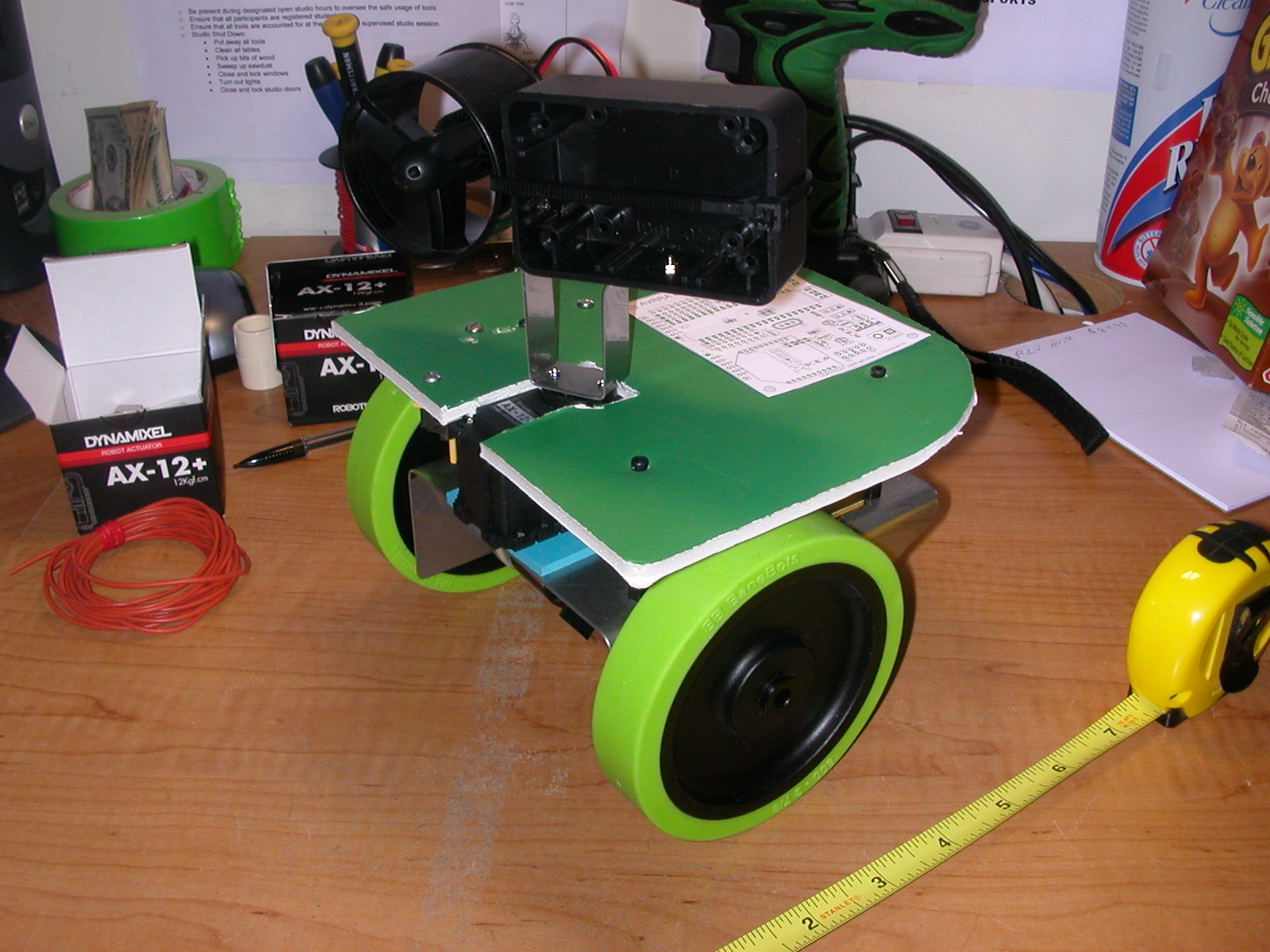
GMR will use the same motors, encoders, and power system that LGM used. The 4 IR rangers are
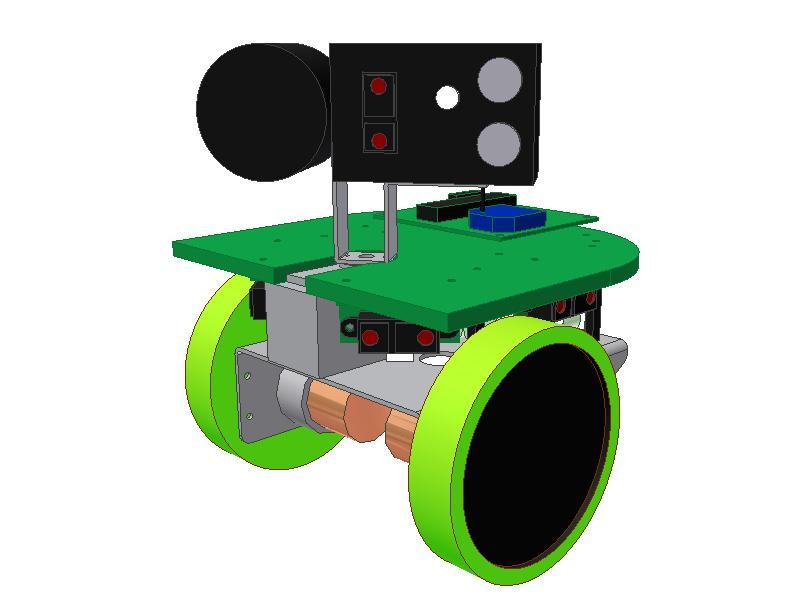
also in a similar configuration. The improvements for this version are numerous: GMR is 45%
smaller, has a panning heading with 300 degrees of movement, 3-7/8" Banebots wheels, and
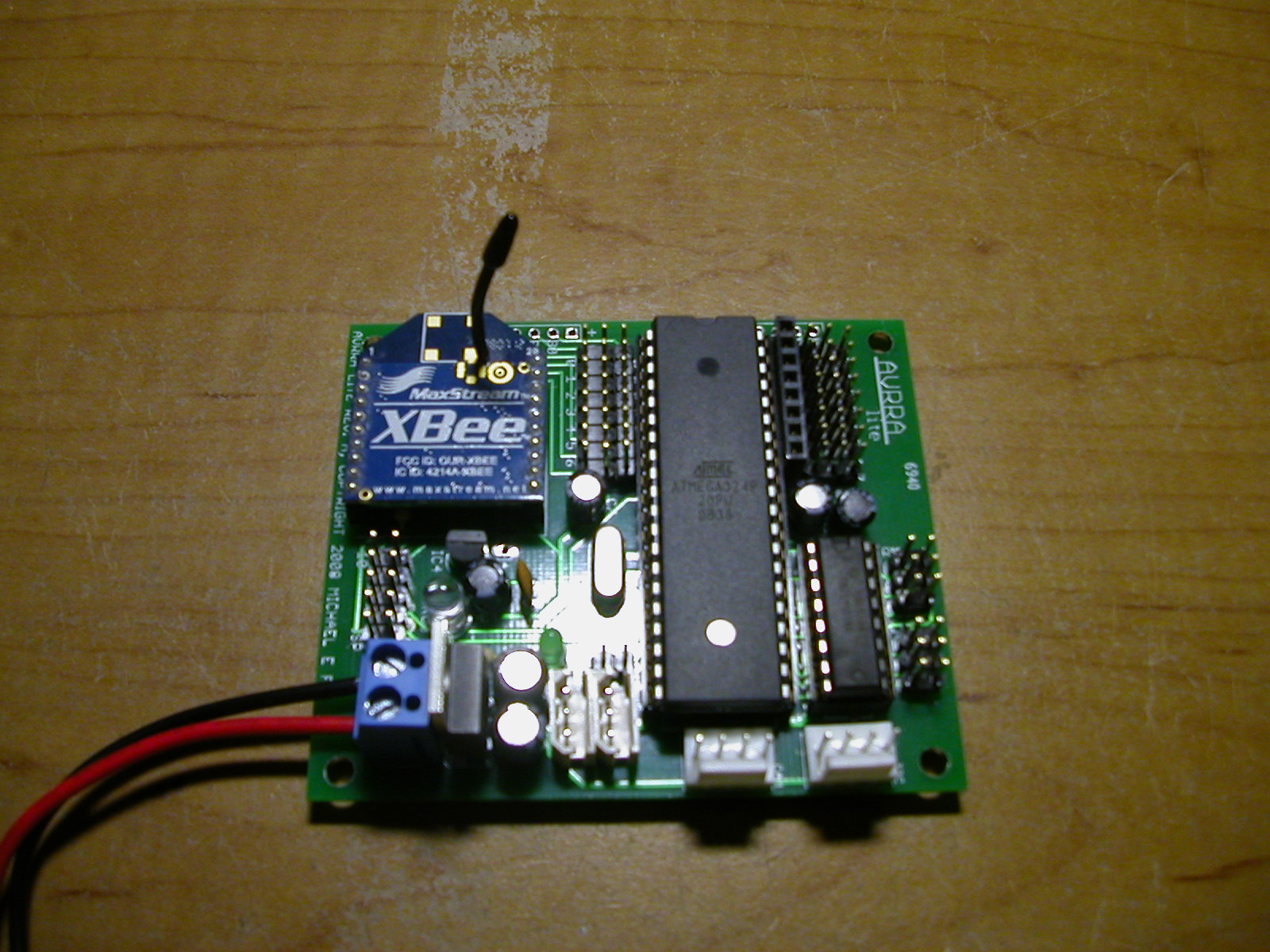
replaces the old Eltec pyroelectric sensor with a TPA81 thermopile. The brain has been
upgraded from a Barello ARC board with an ATMEGA16 to my new AVRRA Lite board, sporting an
ATMEGA324, XBEE wireless, and onboard connectors for the AX-12 servo.
The controller PCB is currently being manufactured. I've completed the lower frame components,
and am currently working on assembly of the base of the robot. I hope to have a fully functional
bot by the end of January.