09 Apr 2010
arbotixrobots
Our friend Andrew Alter, over at Trossen Robotics, has a bit of a servo fetish. He's the kind of guy
for whom AX-12+ servos are just not enough -- he has to have RX-28s and RX-64s -- he recently even
upgraded a number of his servos to the EX-106+ (you can read more about his robot Giger over
here).
Anyways, Andrew wanted to control some RX servos with his ArbotiX, and made that fact well known.
It's often said that "you can't eat your cake and have it too" -- but we at Vanadium Labs don't like
idioms, because if we use them, our robots will too. What could be more annoying than a robot telling
you "There is no free lunch"? So, we decided that the ArbotiX had to now control RX servos -- and
that's exactly what our new RX-bridge can do! This little board plugs into your ArbotiX, transforming
it into the lowest cost RX controller on the market -- and you can still use your favorite apps like
PyPose/NUKE and the familiar Arduino IDE.
P.S. You can see it all in action on Andrew's RX-64 based quadruped -- powered by NUKE:
13 Mar 2010
3d-printingarbotixsmaldogrobots
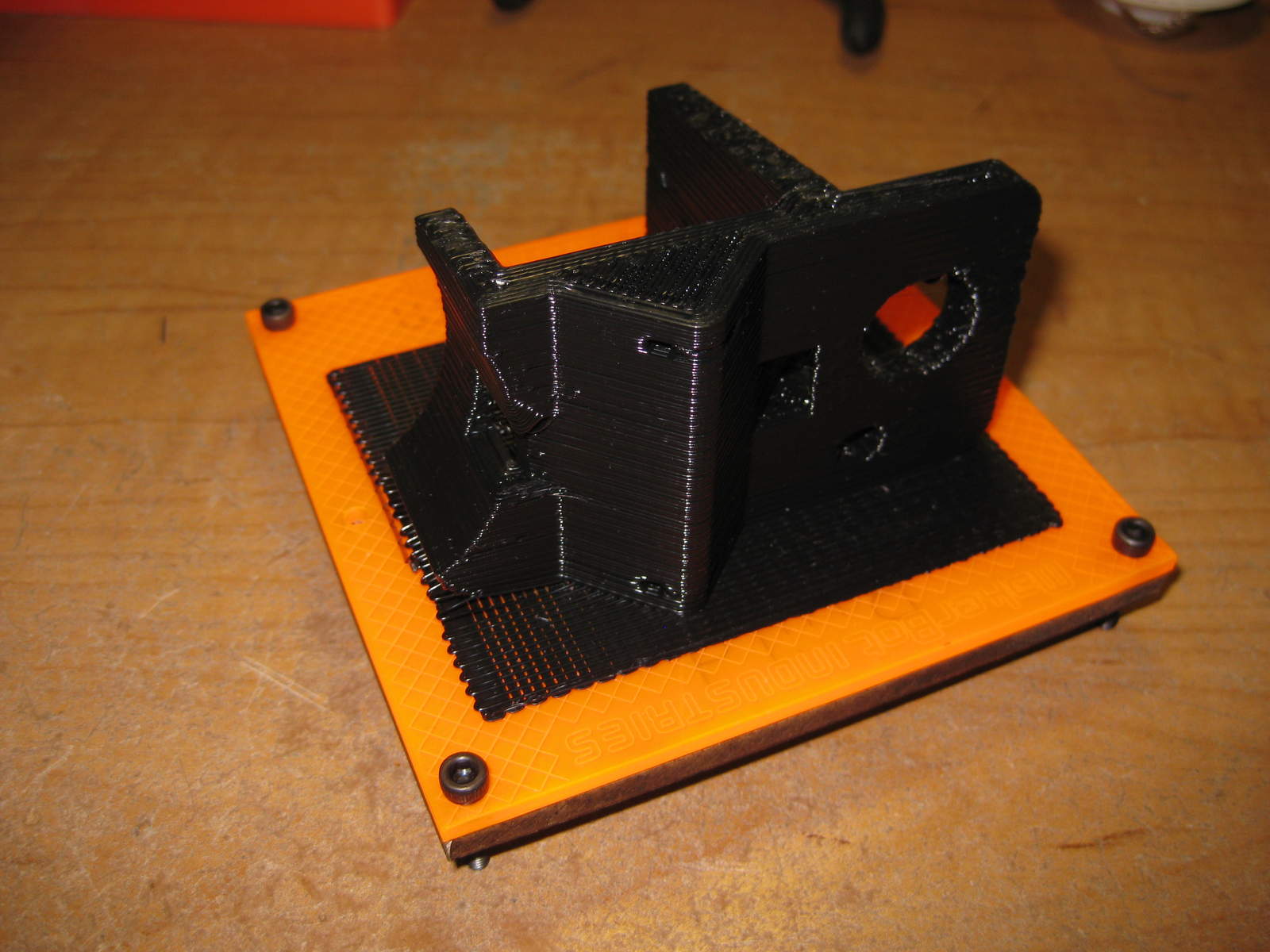
I've been slowly getting the Makerbot tuned in, moving to using an SD card made a huge improvement in build quality, and I'm
finally comfortable enough with the bot to walk away for a while. So, today I finally printed SMALdog's new head, the largest
item I've printed to date, and my first >1h print.
The first one looked great, but about half way through, the pile of ABS got all coiled up, I walked back in to find that the
print head and Z-carriage were pulled to the top of the bot, and the ABS was hanging off the side. De-tangle, reset, chop
off about 10-20ft of ABS, and tried again. This print took 1h38m.
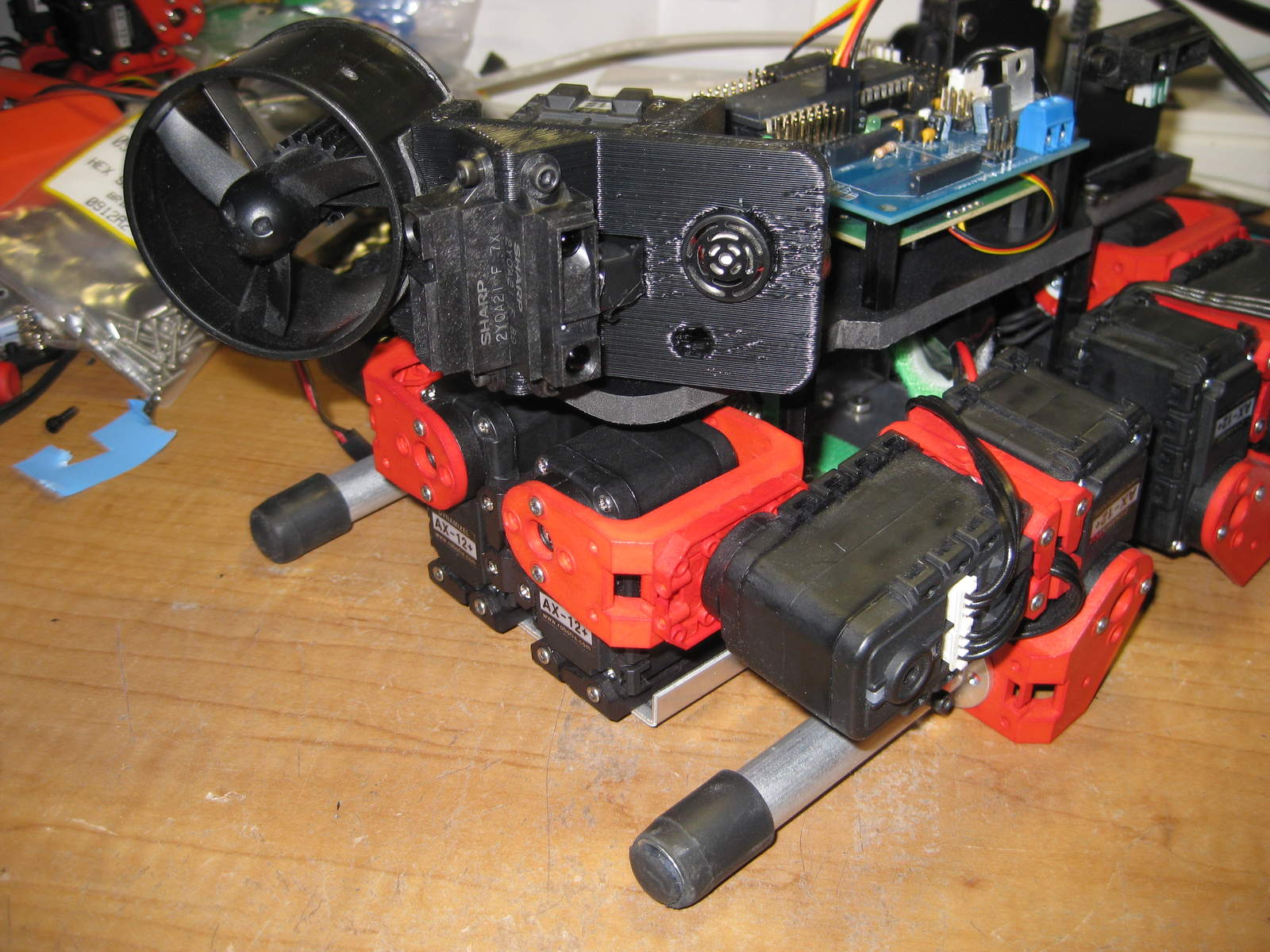
I then cleaned it up, attached the dual IR sensors, and the AX-12 servo. The 5/8" hole for the sonar sensor needed quite a
bit of cleanup, but everything else was nearly perfect. I've now got all the sensors except the IR photodiode mounted,
and the head is on SMALdog.
Now, I've got about 4 wks before the fire fighting competition. Hopefully that is enough time to tune his walking gait,
load the map following code in, and get everything else working....
17 Feb 2010
3d-printingarbotixrobots
It's been a busy month, and the lack of updates here is a testament to that. Over the past month,
Vanadium has released two new products, and has another on the way. The MINI RoboController has
been on shelves for a few weeks at Trossen, and the ArbotiX Commander should be in stock later this
week.
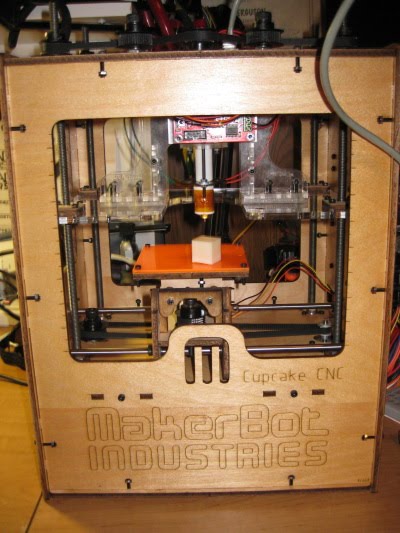
We also purchased a MakerBot, which is now up and running. This little guy will be producing robot
parts soon, as I have a number of projects on the backlog that I want to get going.
As for that product on the way: how about controlling some RX-64 servos with your ArbotiX? You'll
be able to do just that with our new RX-Bridge, a little add-on board for the ArbotiX that converts
it from an AX-12 controller, to an RX-series controller (and EX-106's too).
Lastly, we've been hard at working testing, and the V1.1 release of PyPose/NUKE is just around the
corner. Should be out very shortly, with a number of improvements and bug-fixes. Unfortunately,
mammal-style IK will be held over until v1.2.
 Our friend Andrew Alter, over at Trossen Robotics, has a bit of a servo fetish. He's the kind of guy
for whom AX-12+ servos are just not enough -- he has to have RX-28s and RX-64s -- he recently even
upgraded a number of his servos to the EX-106+ (you can read more about his robot Giger over
here).
Anyways, Andrew wanted to control some RX servos with his ArbotiX, and made that fact well known.
Our friend Andrew Alter, over at Trossen Robotics, has a bit of a servo fetish. He's the kind of guy
for whom AX-12+ servos are just not enough -- he has to have RX-28s and RX-64s -- he recently even
upgraded a number of his servos to the EX-106+ (you can read more about his robot Giger over
here).
Anyways, Andrew wanted to control some RX servos with his ArbotiX, and made that fact well known.