18 Apr 2020
Earlier this month I started blogging again. My blog was hosted on blogger.com,
which was a pretty advanced platform in 2008 when I started blogging.
Now it is pretty dated.
I had a hell of a time trying to put any code blocks in the blog - which for a
software engineer is a real problem.
So this is the new blog. I’ve ported most of the old content over, except for a few
posts which were completely irrelevant (for example, a post which consists of nothing
but a link to a Kickstarter project for Mech Warfare, both of which are since over).
Porting over all of these posts was actually a somewhat fun exercise, I had forgotten
just how much had been posted to this blog over the years. Here’s a few highlights:
In setting up this site, I decided not to bother with a comments section, as the comments
on the old site have generally been a wasteland for some time. If you come across an issue
or are looking for more information, reach out to me by either filing a ticket against
this site on GitHub or
by messaging me on Twitter.
I’ve also updated the domain name to reflect that I might actually post some non-robotics
things here in the future. In that same spirit, most of the existing posts are now
tagged with the new
robots
tag. I’ve had this domain name for a while now, happy to finally put it to use.
Welcome to Robot & Chisel.
10 Apr 2020
robomagellan
national-robotics-week
ros
robots
This is day 6 of my National Robotics Week blog marathon.
See the full set of posts here.
It is really starting to feel like spring here in New Hampshire, so I've been reviving my Robomagellan robot:
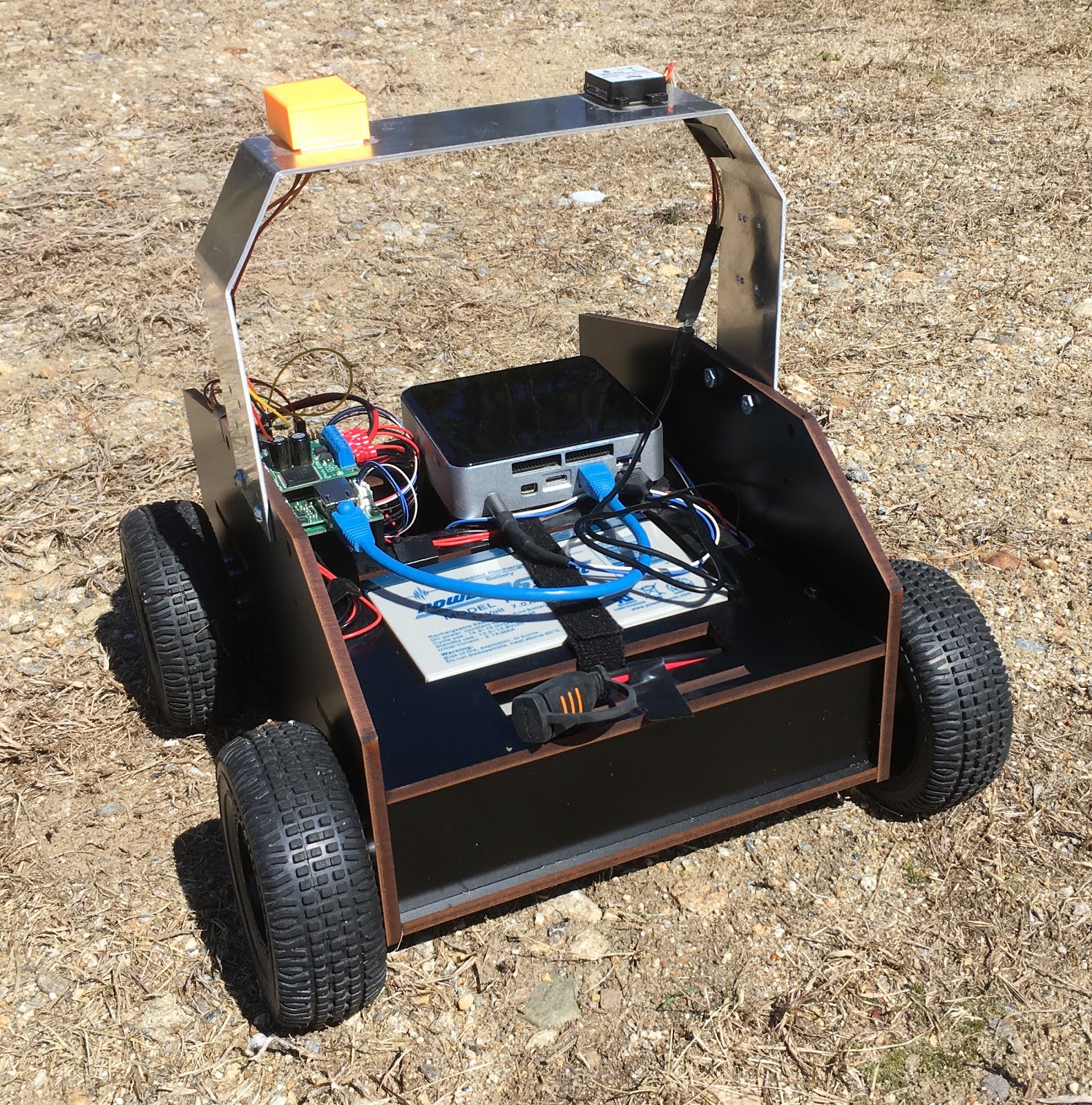 The current robot (not shown: Intel D435 sensor)
The current robot (not shown: Intel D435 sensor)
If you're not familiar with Robomagellan, here is the wikipedia description:
Robomagellan was created by the Seattle Robotics Society and is a small scale autonomous vehicle race in which robots navigate between predefined start and finish points. The start and finish points are usually represented as GPS coordinates and marked by orange traffic cones. In most versions of the competition there are also optional waypoints that the robot can navigate to in order to earn bonus points. The race is usually conducted on mixed pedestrian terrain which can include obstacles such as park benches, curbs, trees, bushes, hills, people, etc..
Unfortunately, there are not many Robomagellan contests happening anymore - but this platform
is still good for me to work on some outdoor navigation. I actually started building this robot
in 2012 when Robomagellan was quite popular. The robot was briefly worked on in 2014 and 2018.
The GitHub contributions view seems to tell this story quite well:
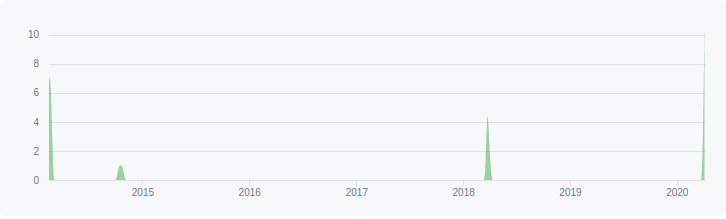 Contribution timeline for Robomagellan
Contribution timeline for Robomagellan
As with any robot that has been developed sporadically over close to a decade, it has gone
through quite a bit of evolution. You can find some of that evolution in the posts tagged
robomagellan,
but here is a summary:
- The computer was originally a Turtlebot laptop. It has since been swapped out for an Intel
NUC. I've previously posted about how I
power the NUC off a 12->19V step up.
- The original version of the Etherbotix was designed for this robot. It now uses the later
Etherbotix design with a plug-in motor driver.
- The robot now has an Adafruit Ultimate
GPS v3. That may change in the near future, as I've been looking at setting up an RTK
solution here on the farm.
- The robot originally used a small chip-level IMU on the Etherbotix, but now uses a
UM-7 for better results. That said, I never
had any luck with the internal UM-7 EKF (even when trying to calibrate it), so there are
probably plenty of cheaper options out there.
- Originally, the main sensor was going to be a UTM-30 on a tilting servo. I've now simplified
that for an Intel D435 depth sensor.
- The robot is still using the original wheels, however I switched from
100:1 gearboxes to
50:1 to get more speed (the 100:1 were really
too much torque, the robot literally could climb a wall).
The robot, as you probably guessed, runs ROS. Specifically I'm using the following packages:
- etherbotix_python -
these are my drivers for the Etherbotix board. In addition to controlling the motors and providing
odometry, this board also acts as a serial->ethernet adapter for the GPS module. The drivers
publish the raw NMEA sentences that are sent by the GPS into ROS.
- um7 - this is the driver for the UM7 IMU.
- nmea_navsat_driver - this is used to
convert NMEA sentences into a sensor_msgs/NavSatFix message.
- imu_transformer - is used to translate the
IMU position into the base_link frame. My IMU is actually mounted "upside down" so this is super
important.
- imu_filter_madgwick - this is used to
track the pose of the IMU. Importantly it fuses the magnetometer information, allowing the IMU
to act like a compass for the global EKF.
- robot_localization - I
use two instances of the EKF filter. The first fuses the IMU with the wheel odometry in order to get a good
local odometry frame. The second fuses the IMU, wheel odometry and GPS (processed by the
navsat_transform_node) into a global odometry.
- rviz_satellite - not used on the robot,
but is an awesome plugin for RVIZ that can download
Global Localization
Setting up the global localization took me a little while to get working. In order to make this process
easier, I setup my
main launch file
so that I have an "offline_mode" argument which doesn't launch the drivers. Then I have a
launch file
for recording bagfiles running only the drivers. I can then change everything in my various pipelines
when re-running the bagfiles locally. This has been quite useful as I've been tweaking the IMU
processing pipeline in parallel with adding the global EKF.
Satellite Imagery in RVIZ
Visualization is always a powerful tool. While RVIZ doesn't have much going for outdoor robots out
of the box, the
rviz_satellite plugin makes it awesome.
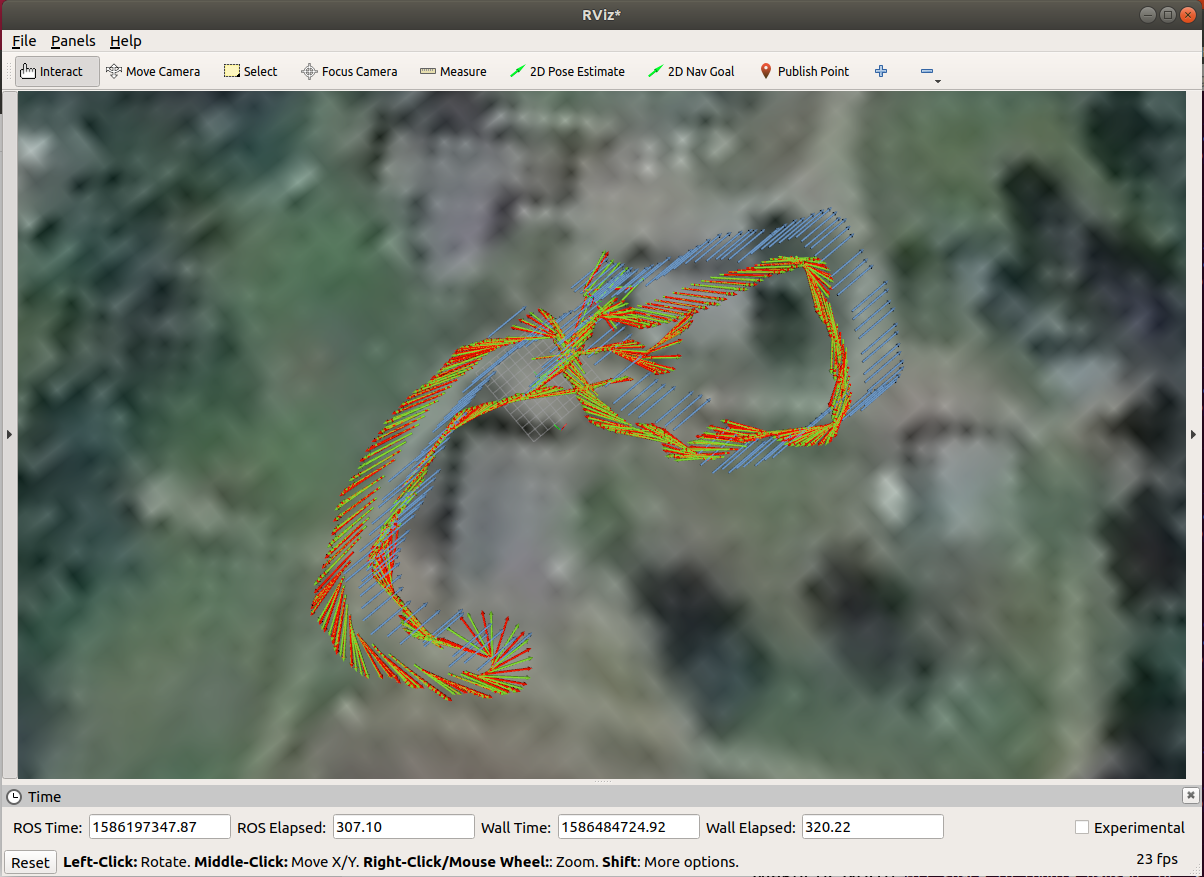 rviz_satellite overlay with some odometry tracks
rviz_satellite overlay with some odometry tracks
The one challenging part of rviz_satellite is setting the "Object URI". For an off-road robot, the
default OpenStreetMaps don't do much. I ended up using MapBox satellite imagery - but getting the
Object URI right took a bit of digging around. It turns out the correct URI is:
https://api.mapbox.com/styles/v1/mapbox/satellite-v9/tiles/256/{z}/{x}/{y}?access_token=XYZ
Also, free accounts with MapBox are limited to 200k tile requests per month. To avoid using these
up, you might want to think about running a separate roscore so you can keep RVIZ running even
when you restart the robot launch file. That said, I've only used 148 tile requests this month
and have been restarting RVIZ quite a bit.
Next Steps
I just recently got the global localization working - I'm probably going to
continue to tweak things. The D435 drivers are working pretty reliably now,
so the next step is mount the D435 on the robot and start integrating the
data and move onto some basic navigation. I also plan to clean up the IMU
calibration code I created and get it merged into
robot_calibration.
09 Apr 2020
calibration
national-robotics-week
robots
ros
This is day 5 of my National Robotics Week blog marathon.
See the full set of posts here.
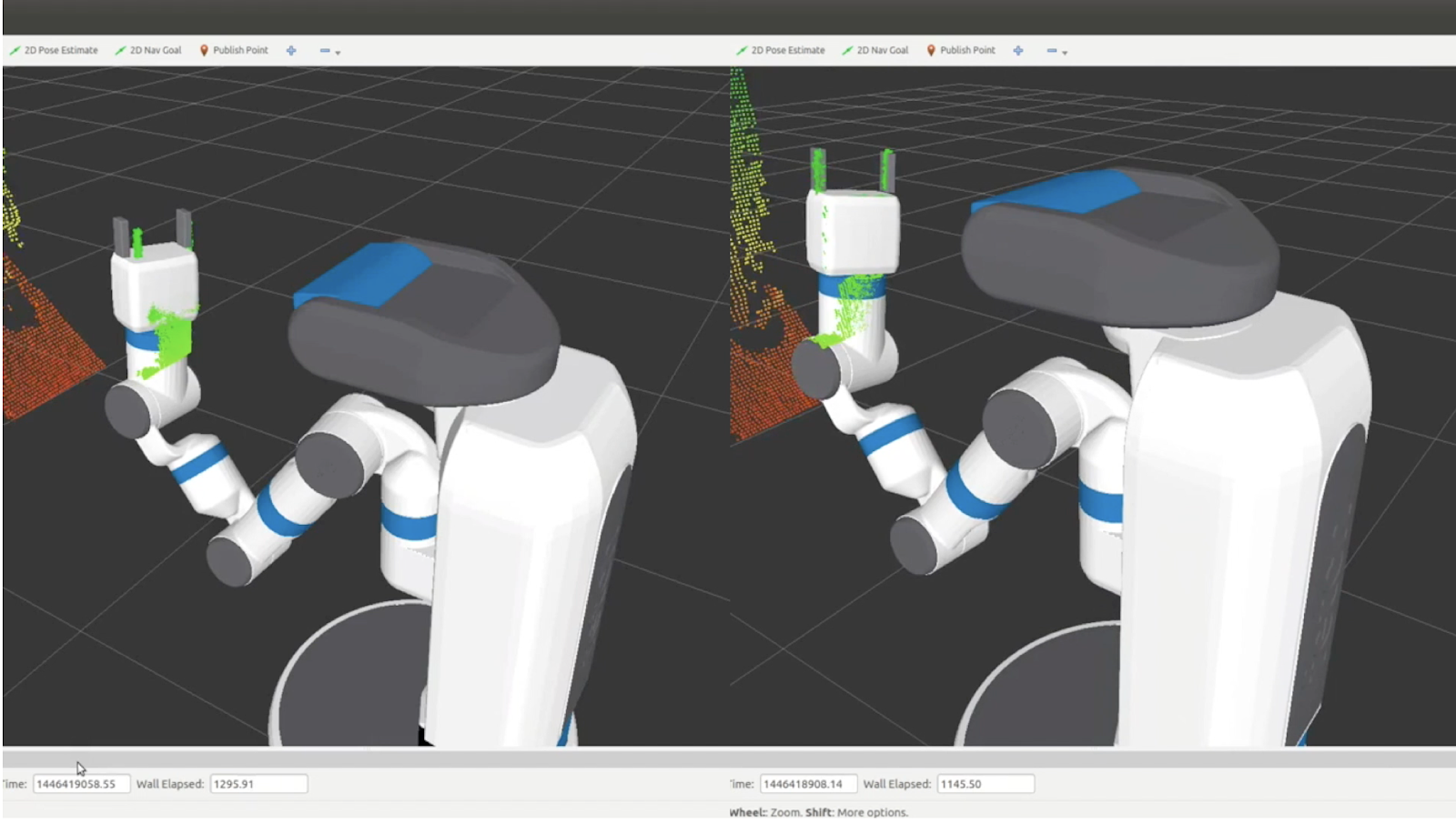 Uncalibrated vs. Calibrated
Uncalibrated vs. Calibrated
Calibration is an essential step in most robotics applications. Robots have many things that need to be calibrated:
- Camera intrinsics - basically determining the parameters for the pinhole camera model. On some
RGBD (3d) cameras, this also involves estimating other parameters using in their projections. This
is usually handled by exporting YAML files that are loaded by the drivers and broadcast on the
device's camera_info topic.
- Camera extrinsics - where the camera is located. This often involves updating the URDF to properly
place the camera frame.
- Joint offsets - small errors in the zero position of a joint can cause huge displacement in where
the arm actually ends up. This is usually handled by a "calibration_rising" flag in the URDF.
- Wheel rollout - for good odometry, you need to know how far you really have travelled. If your
wheels wear down over time, that has to be taken into account.
- Track width - on differential-drive robots, the distance between in your drive wheels is an
essential value to know for good odometry when turning.
- IMU - when fusing wheel-based odometry with a gyro, you want to make sure that the scale of the
gyro values is correct. The gyro bias is usually estimated online by the drivers, rather than given
a one-time calibration. Magnetometers in an IMU also need to be calibrated.
My robot_calibration package can do all of these except wheel rollout and magnetometer calibration
(although the magnetometer calibration will be coming soon).
Evolution of ROS Calibration Packages
There are actually quite a few packages out there for calibrating ROS-based robots. The first package
was probably
pr2_calibration developed at
Willow Garage. While the code inside this package isn't all that well documented, there is a paper
describing the details of how it works:
Calibrating a multi-arm
multi-sensor robot: A Bundle Adjustment Approach.
In basic terms
pr2_calibration works by putting checkerboards in the robots grippers, moving
the arms and head to a large number of poses, and then estimating various offsets which minimize the
reprojection errors through the two different chains (we can estimate where the checkerboard points
are through its connection with the arm versus what the camera sees). Nearly all of the available
calibration packages today rely on similar strategies.
One of the earliest robot-agnostic packages would be
calibration. One of my last
projects at Willow Garage before joining their hardware development team was to make pr2_calibration
generic, the result of this effort is the
calibration package. The downside of both this
package and
pr2_calibration is that they are horribly slow. For the PR2, we needed many,
many samples - getting all those samples often took 25 minutes or more. The optimizer that ran
over the data was also slow - adding another 20 minutes. Sadly, even after 45 minutes, the
calibration failed quite often. At the peak of Willow Garage, when we often had 20+ summer
interns in addition to our large staff, typically only 2-3 of our 10 robots were calibrated
well enough to actually use for grasping.
After Willow Garage, I tried a new approach using Google's Ceres solver to rebuild a new calibration
system. The result was the open source
robot_calibration package.
This package is used today on the Fetch robot and others.
What robot_calibration Can Do
The
robot_calibration package is really intended be an all-inclusive calibration system.
Currently, it mainly supports 3d sensors. It does take some time to setup for each robot since the
system is so broad - I'm hoping to eventually create a wizard/GUI like the MoveIt Setup Assistant
to handle this.
There are two basic steps to calibrating any robot with
robot_calibration: first we capture
a set of data which mainly includes point clouds from our sensors, joint_states data of our robot
pose, and some TF data. Then we do the actual calibration step by running that data through our
optimizer to generate corrections to our URDF, and also possibly our camera intrinsics.
One of the major benefits of the system is the reliability and speed. On the
Fetch
robot, we only needed to capture 100 poses of the arm/head to calibrate the system. This takes only 8
minutes, and the calibration step typically takes less than a minute. One of my interns, Niharika Arora,
ran a series of experiments in which we reduce the number of poses down to 25, meaning that capture and
calibration took only three minutes - with a less than 1% failure rate. Niharika gave a talk on
robot_calibration at ROSCon 2016 and you see the video
here.
We also put together a paper (that was sadly not accepted to ICRA 2016) which contains more details
on those experiments and how the system works
[
PDF].
In addition to the standard checkerboard targets,
robot_calibration also works with LED-based
calibration targets. The four LEDs in the gripper flash a pattern allowing the robot to automatically
register the location of the gripper:
 LED-based calibration target.
LED-based calibration target.
One of the coolest features of
robot_calibration is that it is very accurate at determining
joint zero angles. Because of this, we did not need fancy jigs or precision machined endstops to set
the zero positions of the arm. Technicians can just eye the zero angle and then let calibration do
the rest.
There is quite a bit of documentation in the
README for
robot_calibration.
Alternatives
I fully realize that
robot_calibration isn't for everyone. If you've got an industrial
arm that requires no calibration and just want to align a single sensor to it, there are probably
simpler options.